透视投影中已知两平面的单应矩阵,能否求出这两平面的夹角?
转载:https://www.zhihu.com/question/46805492
透视投影中已知两平面的单应矩阵,能否求出这两平面的夹角?修改
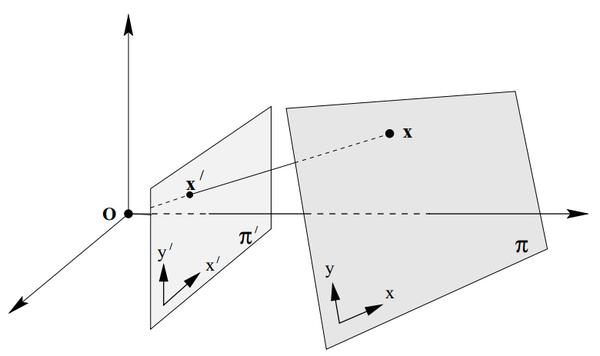 补充一下条件:已知点O到平面π‘的距离及点O在平面π’上的投影点,投影方向为平面π’的法线方向,即已知成像平面为x'oy'平面的相机的内参。
补充一下条件:已知点O到平面π‘的距离及点O在平面π’上的投影点,投影方向为平面π’的法线方向,即已知成像平面为x'oy'平面的相机的内参。这个问题是我在实际应用中遇到的问题,不知道条件是否充足,是否有解修改
• 收起邀请
 邀请回答vczh,专业造轮子,拉黑抢前排。http://gaclib.net在 图形图像 话题下有 12 个回答
邀请回答vczh,专业造轮子,拉黑抢前排。http://gaclib.net在 图形图像 话题下有 12 个回答 邀请回答叛逆者,http://klayge.org在 图形图像 话题下有 7 个回答
邀请回答叛逆者,http://klayge.org在 图形图像 话题下有 7 个回答 邀请回答半闲居士,slam研究生在 计算机视觉 话题下有 5 个回答
邀请回答半闲居士,slam研究生在 计算机视觉 话题下有 5 个回答
更多推荐结果
2 个回答
 王小龙数学话题优秀回答者 数学,计算机视觉,图形图像处理
王小龙数学话题优秀回答者 数学,计算机视觉,图形图像处理
对于世界坐标系中的一个点,它在两个摄像头对应的图像上的坐标分别为:
注意这里的等号是在齐次意义下成立的等号,也就是说给等式任意一边乘上一个非零常数等式依然成立。由这两个关系式就得到了下面这个等式:
因为两个摄像头共光心,可以用四点算法获得单应矩阵,对单应去除内参数的影响,剩下的就是正交矩阵R了。R的第三行,就是摄像头B在世界坐标系(也就是摄像头A的坐标系)中指向正前方的主轴的单位向量:
这个方向也是对应图像平面的法线方向。因为在摄像头坐标系里,Z轴指向正前方,所以根据设定,摄像头A的图像平面的法线方向是
所以二者夹角的余弦值就是这两个向量的内积,也就是。
题主把第二问给删了,嘿嘿。第二问是求两平面的方程,确实比较复杂。
如果一个平面的单位法向量是,到原点的距离是
,那么平面方程可以写为
。现在咱们法线方向都有了,关键是要求图像平面到原点的距离。
拿摄像头A来说,设它的内参数是
需要从这个矩阵中恢复出图像平面到原点的距离。假设现在有一个平面,平行于XY平面,距离原点的距离是,世界中的一个点
投影到这个平面上,坐标就变成了
,这个时候还是三维坐标,但是因为第三个数永远都是
,可以把它舍去,把前两个数当做图像平面上的平面坐标,再用齐次坐标的表示方法去表示这个平面坐标,也就是给第三个数强行置1,就变成了下面这个齐次坐标:
对应的投影矩阵是:
这个矩阵的内参数矩阵是真实的焦距,它的单位和真实世界的度量吻合,可以是米、毫米。但是在实际中,我们通过标定获得的内参数矩阵
的对角线是以像素为单位,而不是以米为单位,它是真实焦距
乘上了一个有关图像传感器的常数,u像素/米:
米 乘以
像素/米 =
像素 =
像素
如果想从或者
中获得原始的
,必须有有关传感器的其他知识,比如它的真实尺寸, 否则是没法求出来的。
收藏 • 没有帮助 • 举报 • 作者保留权利
 Joe Tyler computer vision
Joe Tyler computer vision
透视投影中已知两平面的单应矩阵,能否求出这两平面的夹角?相关推荐
- matlab二维图形中确定一点的坐标系,在CAD中已知一个平面图中两个点的坐标如何建立坐标系以便求出图形中任一点的坐标?...
在CAD中已知一个平面图中两个点的坐标如何建立坐标系以便求出图形中任一点的坐标?以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一 ...
- 单应矩阵(Homography)基本概念和代码测试
简 介: 应用棋盘格图片或者相机图片中与标准棋盘格之间的单应矩阵.其中应用到opencv中的findChessboardCorners, findHomographys等函数. 这位利用单应矩阵进行下 ...
- 什么是单应矩阵和本质矩阵
知乎上面的大牛还是很多,直接搜Homography或者单应矩阵就能得到很多大神的回答,可能回答中的一句话或者一个链接就够自己学习很久. 其实在之前研究双目视觉的时候就接触了对极几何,通过视觉就可以得到 ...
- 单目初始化 单应矩阵 本质矩阵 恢复R t 三角变换求 3D点
单目初始化 单应矩阵 本质矩阵 恢复R t 三角变换求 3D点 博文末尾支持二维码赞赏哦 ^_^ /* * This file is part of ORB-SLAM2 * * 单目相机初始化 * 用 ...
- 09_对极约束与单应矩阵
前言 根据上一节的介绍,我们已经有了匹配好的点对,然后我们就可以根据点对估计相机的运动.这里由于相机的原理不同,我们要分情况讨论: 如果是单目相机,此时我们仅知道2D的像素坐标,要根据两组2D点估计相 ...
- matlab状态空间法算反馈阵,matlab中已知系统的状态方程怎样绘制系统阶跃响应曲线...
matlab中,怎样设置坐标系统的原点在左上角? axisijx=-pi:0.1:pi;y=sin(x);plot(x,y,'g:'); 谁能帮我做Matlab的作业:分析系统能否通过状态反馈实现镇定 ...
- 在标准ASCII码表中,已知英文字母K的十六进制码值是4B,则二进制ASCII码1001000对应的字符是( )
在标准ASCII码表中,已知英文字母K的十六进制码值是4B,则二进制ASCII码1001000对应的字符是( ). A. G B. H C. I D. J 提示:答案B 解析:K的十六进制4B转换成二 ...
- Java算法题目小记3:勾股定理,西方称为毕达哥拉斯定理,它所对应的三角形现在称为:直角三角形.已知直角三角形的斜边是某个整数,并且要求另外两条边也必须是整数。 求满足这个条件的不同直角三角形的个数。
题目 勾股定理,西方称为毕达哥拉斯定理,它所对应的三角形现在称为:直角三角形. 已知直角三角形的斜边是某个整数,并且要求另外两条边也必须是整数. 求满足这个条件的不同直角三角形的个数. [数据格式] ...
- 异构系统中的UUV、异构系统模型统一化及单应矩阵在异构系统中的应用
异构系统中的UUV.异构系统模型统一化及单应矩阵在异构系统中的应用 UUV发展趋势及关键技术 异构编队系统编队 异构系统模型统一化 单应矩阵在异构系统中的应用 UUV发展趋势及关键技术 上一篇多智能体 ...
- 详解OpenCV中的Lucas Kanade稀疏光流单应追踪器
详解OpenCV中的Lucas Kanade稀疏光流单应追踪器 1. 效果图 2. 源码 参考 这篇博客将详细介绍OpenCV中的Lucas Kanade稀疏光流单应追踪器. 光流是由物体或相机的运动 ...
最新文章
- HDU3949 XOR (线性基、查找第k小值)
- 人眼中亮斑的检测、定位和去除
- nyist 132Prime Ring Problem
- lux系统服务器安装后多大,服务器环境搭建
- aspnetcore 应用 接入Keycloak快速上手指南
- 【51单片机快速入门指南】5:软件SPI
- LeetCode 313. 超级丑数(动态规划)
- Linux 服务器 监控命令
- 量化策略回测ATRRSI
- 第二届字节跳动夏令营启动全球报名,图灵奖得主授课
- 莫烦python学习笔记之numpy.array,dtype,empty,zeros,ones,arrange,linspace
- jieba 结巴结巴结巴
- 八个小技巧教你做出舒服的MG动画
- 适配器模式(Adapter模式)
- codesmith生成SQLSERVER实体(带注释)
- 论文解读|BMVC 2019|DABNet: Depth-wise Asymmetric Bottleneck for Real-time Semantic Segmentation
- X86与ARM平台下的参数传递机制
- 千与千寻,真是一部给大人看的动画片
- iOS 仿系统指南针
- Android微信登录引起的内存泄漏