自动驾驶技术之——无人驾驶中的CAN总线
CAN总线在整个无人驾驶系统中有着十分重要的作用。除了在VCU信号需要通过CAN总线进行传输外,无人车上的某些传感器(如雷达、Mobileye)的信号传递也是通过CAN实现的。
前言
本文主要内容是——无人驾驶中的CAN(Controller Area Network )总线。
CAN总线在整个无人驾驶系统中有着十分重要的作用。除了在VCU信号需要通过CAN总线进行传输外,无人车上的某些传感器(如雷达、Mobileye)的信号传递也是通过CAN实现的。
我在无人驾驶,个人如何研究?中提到过
实现一个无人驾驶系统,会有几个层级: 感知层 → 融合层 → 规划层 → 控制层 更具体一点为: 传感器层 → 驱动层 → 信息融合层 → 决策规划层 → 底层控制层
“传感器层”在之前的分享中已经介绍过了,这次主要介绍的是“驱动层”相关的内容。
正文
CAN通信是一套高性能、高可靠性的通信机制,目前已广泛应用在汽车电子领域。有关CAN的总线的原理及特性并不是本次分享的重点。本文的重点在无人驾驶系统获取到CAN消息后,如何根据CAN协议,解析出想要的数据。从CAN总线中解析出传感器的信息,可以说是每个自动驾驶工程师,甚至每一个汽车电子工程师必备的技能。
认识CAN消息
以百度推出的Apollo开源的代码为例做CAN消息的讲解,我们先看到每一帧的CAN消息是如何被定义的。
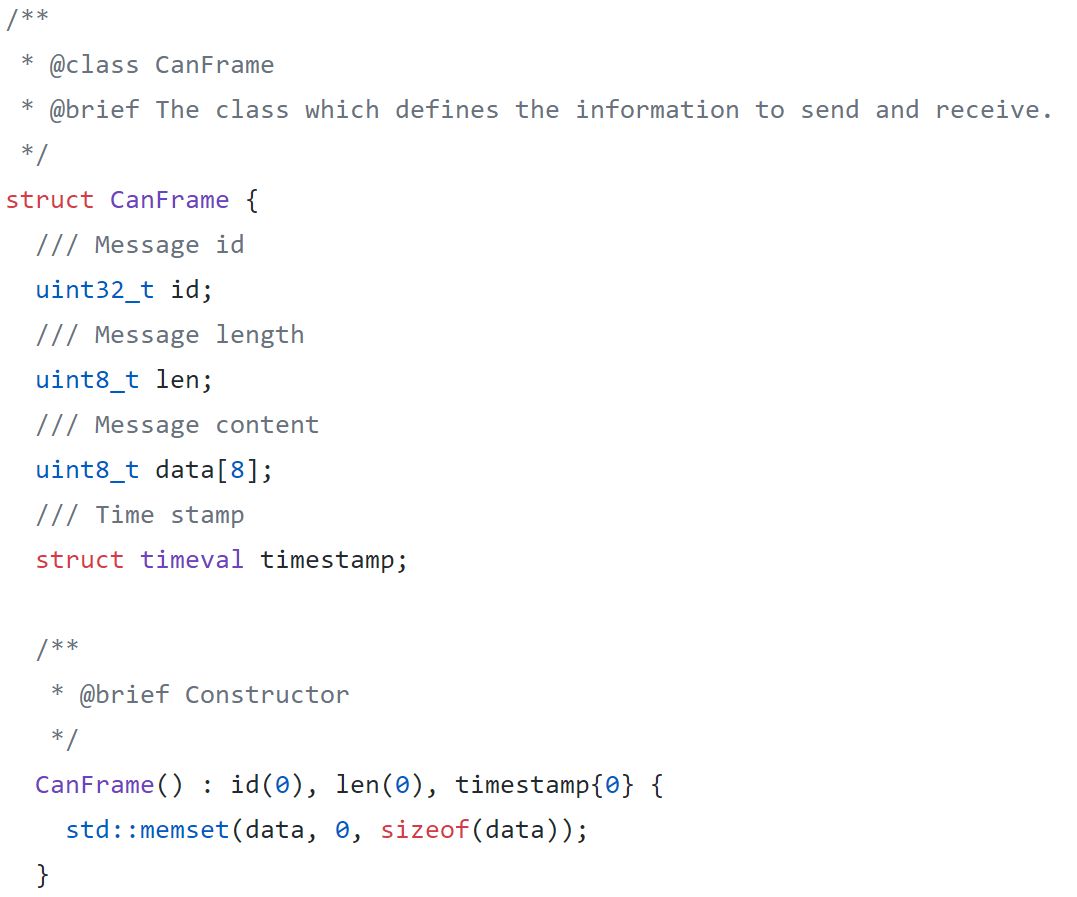
可以看到这个名为CanFrame的消息结构中包含4个关键信息,分别是:
1. uint32_t id
CAN消息的ID号。
由于CAN总线上传播着大量CAN消息,因此两个节点进行通信时,会先看id号,以确保这是节点想要的CAN消息。最初的CAN消息id号的范围是000-7FF(16进制数),但随着汽车电控信号的增多,需要传递的消息变多,信息不太够用了。工程师在CAN消息基础上,扩展了id号的范围,大大增加了id号的上限,并将改进后的CAN消息称为“扩展帧”,旧版CAN消息称为“普通帧”。
如果拿写信做比较,这个id就有点类似写在信件封面上的名字。
2. uint8_t len
CAN消息的有效长度。
每一帧CAN消息能够传递最多8个无符号整形数据,或者说能够传递8*8的bool类型的数据。这里的len最大值为8,如果该帧CAN消息中有些位没有数据,这里的len就会小于8。
3. uint8_t data[8]
CAN消息的实际数据。
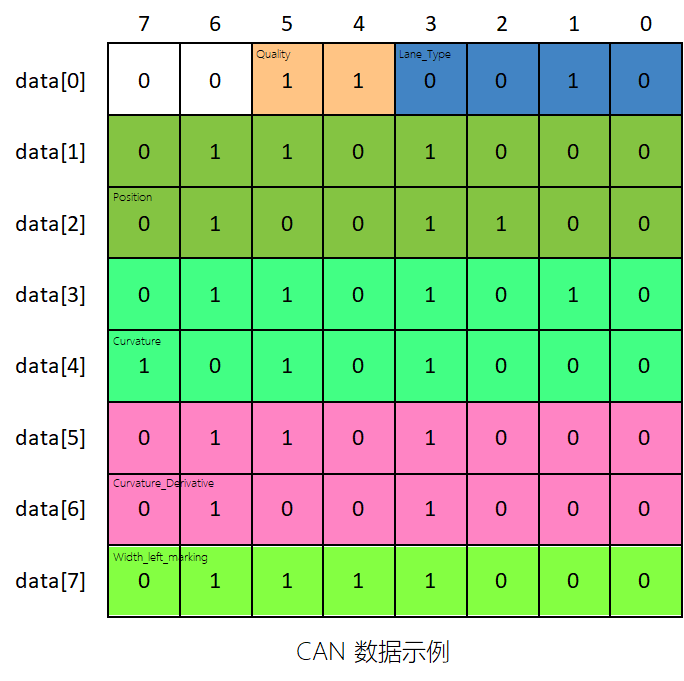
正如刚才提到的,每一帧CAN消息都包含至多8*8个bool类型的数据,因此可以通过8*8个方格,可视化CAN消息中的data。如下图所示:
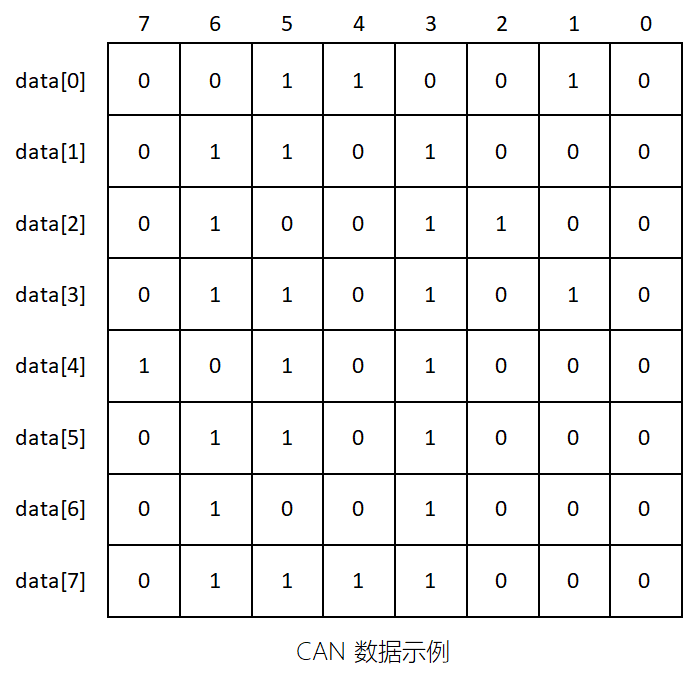
在没有CAN协议帮助我们解析的情况下,这里的数据无异于乱码,根本无法得到有用的消息,这也是CAN消息难以破解的原因之一。
4. timestamp
CAN消息的时间戳。
时间戳表示的是收到该CAN消息的时刻。通过连续多帧的时间戳,可以计算出CAN消息的发送周期,也可以用于判断CAN消息是否被持续收到。
综上,每帧CAN消息中最重要的部分其实是data,即8*8的bool值。所谓解析CAN消息,其实就是解析这8*8个bool类型的值。
认识CAN协议
目前业界的CAN协议,都是以后缀名为dbc的文件进行存储的。德国Vector公司提供CANdb++ Editor是一款专门用于阅读dbc文件的软件。
如下图所示,为Mobileye提供的车道线的dbc文件。(文末提供CANdb++ Editor安装包和Mobileye车道线的dbc文件的获取方法)
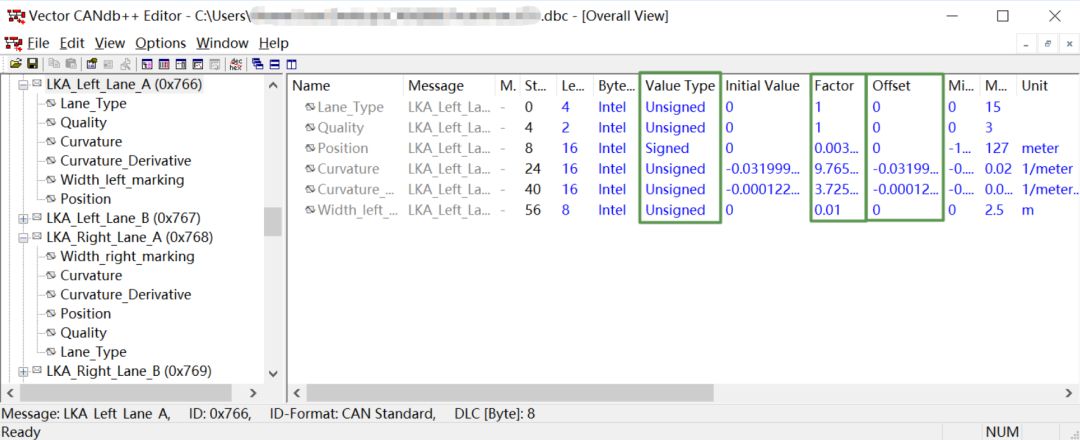
以id号为0x766的LKA_Left_Lane_A为例,这是Mobileye检测无人车左侧车道线的部分信息,包括了左侧车道线的偏移量,曲率等。该帧CAN消息(Message)中的五个信号(Signal),分别是Lane_Type、Quality、Curvature、Curvature_Derivative、Width_left_marking、Position。
每个信号的具体描述显示在软件右侧,其中与解析直接相关的三个要素已用绿色框选中。
1. Value Type(Unsigned或Signed)
某些物理量在描述时是有符号的,比如温度。而描述另外一些量时,是没有符号的,即均为正数,比如说曲率。
2. Factor 和 Offset
这两个参数需要参与实际的物理量运算,Factor是倍率,Offset是偏移量。例如Lane_Type和Quality信号的Factor为1,Offset为0,而其他信号的Factor均为小数。具体的计算方法请往下看。
双击LKA_Left_Lane_A,打开Layout页,会发现很熟悉的方块阵列,如下图所示。
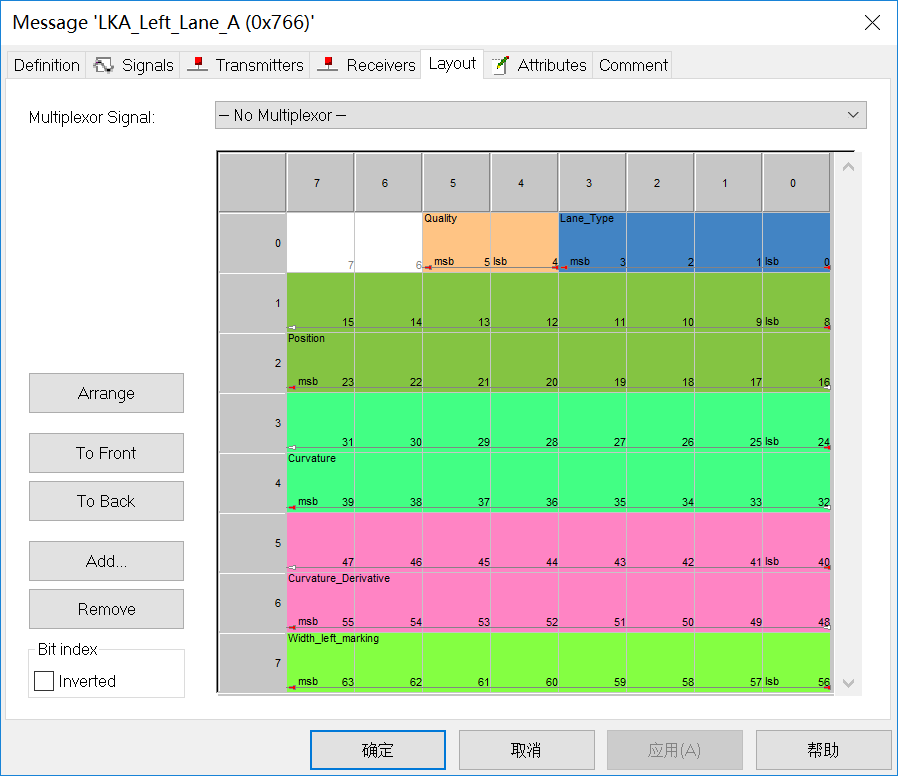
工程师真正关心的恰好是这块彩色图,因为该图上的每个小方块和data中的每一个bool量一一对应。这就是CAN协议的真面目。
解析CAN信号
由于彩色方块图与data是一一对应的,我们将两个图叠加,将得到如下图所示的data图。
每个信号物理量的计算公式为:

1.Factor为1的物理量
由于Lane_Type和Quality的Factor为1,Offset为0,因此十进制值为多少,实际物理量即为多少。
从图中就能直接看出Quality这个信号占据两个位,二进制数11,换算为十进制是3(1*2 + 1*1);Lane_Type占据四个位,二进制数为0010,换算为十进制是2(0*8 + 0*4 + 1*2 + 0*1)。
所以这一帧信号表示此时的左车道线Lane_Type值为2,Quality值为3。对于整数值,通信双方可以约定规则,比如Mobileye就规定了,Quality为0或者1时表示车道线的置信度较低,不推荐使用此时的值;2表示置信度中等,3表示置信度较高,请放心使用。
2.Factor为小数的物理量
对于Factor不为1的物理量,比如Position,需要使用移位的方法进行解析,但解析公式保持不变。以百度 Apollo提供的源码为例进行讲解。

这里的bytes即为CAN消息中的data,首先将Position信号所在的行取出来,将第1行的8个bool值存储在变量t1中,将第二行的8个bool值存储在变量t0中。由于在这条CAN消息中,Position同时占据了高8位和低8位,因此需要将第一行和第二行的所有bool位拿来计算,高8位存储在32位的变量x中,低8位存储在32位的变量t中
现在需要将高8位和低8位拼接,将高8位左移8位,然后与低8位求或运算,即可得到Position的二进制值。随后进行的左移16位,再右移16位的操作是为了将32位的变量x的高16位全部初始化为0。之后将x乘以Factor再加上Offset即可得到真实的Position值,给真实值加上单位meter,即可获取实际的物理量。
与CAN类似的通信协议
VCU、雷达等通过CAN总线传递信号,随着CAN的负载越来越高,很多传感器选择了其他通信方式。比如激光雷达的点云数据量太过庞大,使用的是局域网的方式进行传递;再比如GPS和惯导使用的是串口进行通信。
虽然通信方式和通信协议千差万别,但解析的方法都是一样的。
结语
好了(^o^)/~,这篇分享的内容基本上讲清楚了CAN总线消息的解析过程。这是无人驾驶系统传感器驱动层的基本理论。
由于不同ID的CAN消息的结构不一样,因此在写解析代码时,需要十分仔细,否则会给后续处理带来想不到的bug。
如果你对CAN总线的解析还有什么疑问,可以在评论区与我互动。
▎本文转载自自动驾驶干货铺,作者:陈光,智车科技整编,转载请注明来源。
转载于:https://www.cnblogs.com/isAndyWu/p/9522844.html
自动驾驶技术之——无人驾驶中的CAN总线相关推荐
- 无人驾驶中的CAN总线
原文转自 陈光-自动驾驶干货铺-https://mp.weixin.qq.com/s/C4I86Wm4yERfGqO7aZyLsg 原文标题:无人驾驶技术入门(十一)| 无人驾驶中的CAN总线 前言 ...
- 数据详解国内外自动驾驶技术水平
4月27日-5月4日,被形容为史上最挤.堪比春运的2018年北京国际车展圆满举行.展会中,"国货"."新能源"."自动驾驶"等元素频繁出现, ...
- 为自动驾驶技术服务的基础道路设施
导 语 服务于人和机器的共生道路在推动自动驾驶技术发展.减少交通事故等方面有着至关重要的作用.那么,什么是共生道路?共生道路为什么会起到如此关键的作用?共生道路的发展趋势是怎样的?请看公安部道路交通安 ...
- 赋能自动驾驶技术腾飞——海天瑞声发布『DOTS-AD』自动驾驶标注平台
自动驾驶技术的发展已经取得了巨大进步,现在越来越多的汽车制造商和科技公司都在开发自己的自动驾驶汽车.但要想汽车真正实现自动驾驶还需要面对很多挑战,其中之一就是准确性问题.这让数据标注在自动驾驶技术中显 ...
- 自动驾驶技术:机会与挑战
** I. 介绍 ** A. 自动驾驶技术的概述以及潜在应用场景 自动驾驶技术是近年来快速发展的一项前沿科技,其基本原理是通过搭载在车身上的感知.决策和控制系统,使汽车可以在不需要人类驾驶的情况下自主 ...
- 人工智能应用于自动驾驶技术中的优势
自动驾驶技术将成为未来汽车一个全新的发展方向,车辆实现自动驾驶,包含了多种人工智能的技术应用. 人工智能应用于自动驾驶技术中的优势 自动驾驶的定位技术 定位技术是自动驾驶车辆行驶的基础.目前常用的技术 ...
- 【自动驾驶】高精地图在无人驾驶中的应用
高精地图是无人驾驶核心技术之一,精准的地图对无人车定位.导航与控制,以及安全至关重要.本文是"无人驾驶技术系列"第七篇,首先介绍高精地图与传统地图的区别,然后介绍其特点及制作过程. ...
- 无人驾驶 | 自动驾驶技术和机器人技术的对比
这是学习中兴开发者社区金明.郑卫军的总结笔记,感谢大佬的总结,学习记录一下 机器人技术的核心是运动控制,包括定位.导航.感知.决策.跟踪等,可广泛应用在家庭服务机器人.工业自动化机器人等领域.自动驾驶 ...
- 中国信通院苏丹等:5G+自动驾驶技术专利态势分析
0 引言 自动驾驶技术涉及多学科融合,其主要采用人工智能.视觉计算.雷达.监控装置和全球定位系统等多个技术协同合作,使汽车在没有人主动操作的情况下自动安全地行驶[1].5G作为新一代通信技术标准,其高 ...
- 自动驾驶、无人驾驶、车联网笔记分享
持续更新整理一些自动驾驶领域.无人驾驶领域.车联网领域的优秀资源笔记,分享给有需要的人. 车路协同.车联网.智慧交通.智能网联车.自动驾驶.无人驾驶.高精度地图资料汇总与整理 车路协同优质资料整理地址 ...
最新文章
- PHP执行批量mysql语句
- P2634 [国家集训队]聪聪可可(点分治做法)
- delphi random 六位_《蒙面唱将猜猜猜》第五季将播,六位唱将率先登场
- mtk android 5.1 logo,Android ROM DIY之MTK平台手机通用移植
- apache伪静态把css 排除掉_(02)CSS 选择器详解 | CSS
- 修改GDAL库支持IRSP6数据
- c语言程序设计 甘勇,C语言程序设计
- python建立ip代理池_如何建Python爬虫的IP代理池?3步学会搭建IP代理池
- libcrypto.so.1.0.0缺失问题
- LeetCode 1429. First Unique Number
- sd卡卡槽_一种SD卡卡槽的制作方法
- 2020-03-02
- 公众号600篇文章分类和索引
- python适用的操作系统是_python 操作系统和进程
- UVALive 6959 - Judging Troubles
- 稳压二极管和TVS二极管的区别
- Linux进程间通信(五)——进程间通信
- java 哪些类实现了set_Java- Set及其实现类
- 遥感影像镶嵌拼接如何抠图及多源影像补图,如何进行区域替换去云异常区域
- centos搭建samba服务器