无感FOC滑膜观测器学习
无感FOC滑膜观测器学习
ctime:2020-02-04 20:40:32 +0900|1580816432
标签(空格分隔): 技术 硬件
目标是要通过滑膜观测器来获取电机转子位置
根据电机的数学模型,只要得到A B 相的反电动势即可算出位置
而可以较为简单获取的参数只有相电压(UA UB UC)和相电流(IA IB IC)
我一开始有一个疑问,既然要AB相的反电动势,那么我采出三相的反电动势,在做一个3->2的克拉克变换不就可以得到AB相的反电动势了么?
这个想法实际上是受以前做BLDC6步换向影响,当时6步换向是采集没有导通的相的反电动势,检测是否过零。
但现在在SVPWM中,三相是都导通着,并没有不导通的相,所以并不能检测到三相的反电动势,只能测出相电压。
好了,这是一个小插曲。有了相电压之后,我们还得采样相电流,相电流作何用途等下再讲。
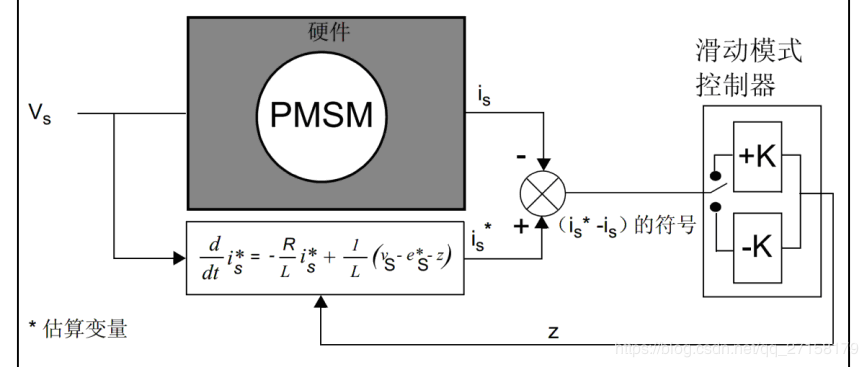
从电机方程中,我们可以得到反电动势与电流的方程,方程参数为采样时间、电感、电阻等。
通过不断地调整估算反电动势 E s ∗ E^{s*} Es∗,使估算电流也不断变化。估算电流与实际电流做差,得到差乘以增益再补偿到估算的反电动势中。
这样,当估算电流与实际电流几乎相等时,我们便可以用这个估算的反电动势取计算角度了。
这里有一个误区,由于电机的参数未必准确,因此才采用这种方法。实际上,如果电机的电感电阻等时完全准确的,那么我们直接使用
实际电流套到电机方程中,就可以计算出反电动势了。然而由于电机参数不准确,因此采用这种滑模观测的方法。
需要注意的是,这样得到的反电动势数值上与真实的反电动势一般是不相等的(因为参数未必准确),二者可能差一个系数倍。
但对于计算角度来说,这个无所谓,因为计算角度的时候,是使用反正切,只要alpha相的反电动势与beta相的数量级一致,那么算出的角度,
应该也是可以相信的。
反电动势的公式为: e S = w ∗ ϕ e^S=w*\phi eS=w∗ϕ
其中, ϕ \phi ϕ 分为alpha相的磁链和beta相的磁链,需要各自乘以cos和sin
得到两相的反电动势之后,进行反正切运算,就可以得到theta了。
无感FOC滑膜观测器学习相关推荐
- 永磁同步电机无感foc 磁链观测器 位置估算源码 正弦波控制方案
永磁同步电机无感foc 磁链观测器 位置估算源码 正弦波控制方案 直流无刷电机无感foc源码,无感foc算法源码 1. 速度估算位置估算的代码所使用变量全部用实际值单位,能非常直观的了解无感控制电机模 ...
- 基于龙贝格观测器的永磁同步电机无感FOC 采用龙伯格观测器提取电机反电势,使用PLL从反电势中获得转子位置和速度信息
基于龙贝格观测器的永磁同步电机无感FOC 1.采用龙伯格观测器提取电机反电势,使用PLL从反电势中获得转子位置和速度信息. 2.提供算法对应的参考文献和仿真模型,支持技术解答. 仿真模型纯手工搭建. ...
- 电机马达带负载转矩前馈补偿的永磁同步电机无感FOC 采用龙伯格负载转矩观测器,可快速准确观测到负载转矩
电机马达带负载转矩前馈补偿的永磁同步电机无感FOC 1.采用龙伯格负载转矩观测器,可快速准确观测到负载转矩: 2.将观测到的负载转矩用作前馈补偿,可提高系统抗负载扰动能力: 提供算法对应的参考文献和仿 ...
- 永磁同步电机矢量控制中的双闭环是什么意思_STM32 TALK | 无感FOC方案原理机器控制难点分析...
电机在各种应用中,都是最广泛.最核心的存在.随着传统应用转变翻新.新兴应用层出不穷,这几年的电机界,如果不会FOC,都不好意思说自己是做电机的.八月底,在电堂联合ST举办的"STM32 TA ...
- 基于脉振高频电压注入的永磁同步电机无感FOC
基于脉振高频电压注入的永磁同步电机无感FOC 1.带转子初始位置检测,包括极性判断,可实现任意初始位置下的无感起动运行: 2.可实现带载起动和突加负载运行: 提供算法对应的参考文献和仿真模型,支持技术 ...
- 基于ESO的永磁同步电机无感FOC 采用线性扩张状态观测器(LESO)估计电机反电势,利用锁相环从反电势中提取位置和转速信息
基于ESO的永磁同步电机无感FOC 1.采用线性扩张状态观测器(LESO)估计电机反电势,利用锁相环从反电势中提取位置和转速信息,从而实现无位置传感器控制: 2.提供算法对应的参考文献和仿真模型. 购 ...
- 同步磁阻电机SynRM高频注入无感 FOC 采用高频注入法实现SynRM零低速下无位置传感器起动运行
同步磁阻电机SynRM高频注入无感 FOC 1采用高频注入法实现SynRM零低速下无位置传感器起动运行: 2.提供算法对应的参考文献和仿真模型 仿真模型纯手工搭建,不是从网络上复制得到. 仿真模型仅供 ...
- stm32f030无感foc方案,资料包括原理图,pcb,源程序
stm32f030无感foc方案,资料包括原理图,pcb,源程序,观测器参数,电流环参数计算表格. 是资料 编号:321500665931606442asdf2013_2229
- InstaSPIN - FOC 无感FOC技术
各位同学,工程师朋友们大家好, 当下电机控制可能不是什么朝阳产业,不会像人工智能那样热门,站在风口. 但以电机控制为核心的运动控制一直是工业4.0的关键技术.这才是技术驱动型的实业. 电机控制 在四轴 ...
最新文章
- Spring Boot + Redis:模拟 10w 人的秒杀抢单!
- sqlalchemy1.4风格2.0
- git/ TortoiseGit 在bitbucket.org 使用证书登陆
- 函数sigqueue
- CentOS安装五笔输入法
- android n 支持机型,Android N无缝更新功能不适于现有机型
- java零碎要点009---java实现服务器心跳机制,TCP握手
- MySQL锁系列3 MDL锁
- 如何实施域控制器活动目录备份与恢复
- 一天搞懂深度学习--深度学习简介
- java解析魔兽争霸3录像_Java解析魔兽争霸3录像W3G文件(三):解析游戏开始前的信息...
- Materials Studio教程(中科大)
- github不小心同步覆盖了本地文件
- 战神笔记本电脑自带access吗_战神GX9系列超享windows10搭载微软office2016
- 头文件防卫式声明/引用/static/extern/
- 电商商品3d展示---插件spritespin
- 区块链如何分析这些涨涨跌跌
- Oracle数据库实验4 Oracle数据库安全管理
- VBA调用Shell
- Java并发编程(中下篇)从入门到深入 超详细笔记