Programming Computer Vision with Python (学习笔记十)
现在考虑一个全景图拼接的应用场景,假设现有两张图片需要拼接成一张全景图,这两张图片是通过相机右转一定角度拍摄出来的,两张图片有部分取景是重叠的。如何实现拼接?当然这是一个不简单的问题,我们现在只考虑实现拼接目标的第一步:找出图像中重叠的内容,以及分别在两张图片中的位置。
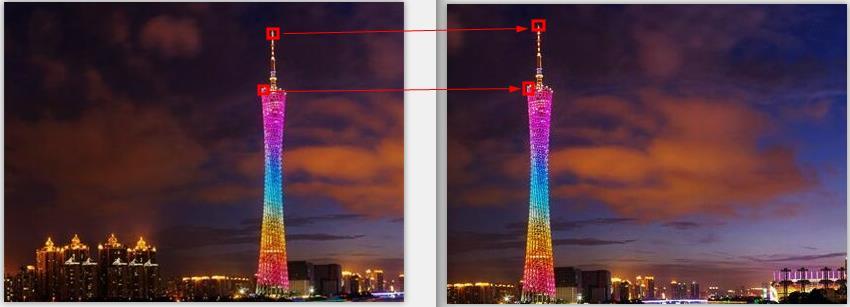
如下图所示,左右是两张稍有不同的图片,但都包含了广州塔,左图红色框中标出了两个感兴趣的点,我期望找出它们在右图的对应位置(即对应点)。
首先,要确定检测哪些点,即哪些点是我们感兴趣的?这可以使用Harris角检测(见上篇笔记)方法来得到图像的角点集合,然后通过设置合适的阈值和坐标范围来找出我们感兴趣的点。有了两个图像的兴趣点集后,又如何能计算出它们的对应关系呢?这就需要解决两个问题:
兴趣点如何描述
兴趣点之间的对应关系如何计算
兴趣点描述
兴趣点,也即用Harris角检测出来的结果,它只有坐标和像素值,只有这些信息不足以用于匹配,无法从另一张图像中查找是否包含这个点。所以需要增加点的表征信息,一种方法是使用围绕点周围一小块的图像来描述这个点,如采用上图中所标记的方式,即:以兴趣点为中心划出一个小矩形,将区域内所有像素值以一向量进行存储,用这个向量来描述这个兴趣点,那么此向量称为兴趣点描述符(interest point descriptor,下简称IPD)。
下面实现一个函数,为所有角点生成IPD:
def get_desc(image, filtered_coords, wid = 5):#image为原图像,filtered_coords为角点的坐标,wid为矩形的“半径”desc = []for coords in filtered_coords:ipd = image[coords[0] - wid : coords[0] + wid + 1,coords[1] - wid : coords[1] + wid + 1].flatten()if ipd.shape[0] > 0:desc.append(ipd)return desc兴趣点相关度
如何确定左图中的某个兴趣点,对应右图中的某个兴趣点?对应关系,不一定完全是等价关系,即两个点虽然是对应关系,但它们对应的IPD并不完全相同。因为我们这里讨论的找对应点的方法,允许两张图像在亮度、缩放上有一定的区别。所以两个点的对应关系不能用IPD等价来匹配,而是要采用相似度或相关度来计算,相关度越高,它们越可能是对应关系。而相关度,可以使用现成的数学模型——皮尔逊相关系数(Pearson's r,也被称为皮尔森相关系数r,下简称r系数)来表示。所以,计算两个点的对应关系就转化为计算两个IPD的r系数。
r系数被广泛用于度量两个变量之间的相关(线性相关)程度,它是两个变量之间的协方差和标准差的商,一种等价表达式为标准分的均值:
r =
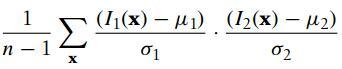
I1和I2为样本集,μ1为I1的平均值,μ2为I2的平均值,σ1为I1的标准差,σ2为I2的标准差,上式计算结果即为r系数,范围为-1到1。 r系数为正且越大,表示I1和I2同时趋向于它们各自的平均值,变化方向一致,相关度越高。系数为0意味着两个变量之间没有线性关系。
把两个点对应的IPD代入上述公式的I,可得到两个点的相关程度。所以找两个图像之间兴趣点的对应关系,计算步骤是:
分别对两个图像应用Harris角检测,得到图像1的兴趣点集1,和图像2的兴趣点集2
设定IPD的矩形大小,计算所有兴趣点的IPD,得到IPD_SET_1和IPD_SET_2两个集合
设定r系数的阈值,如0.5,即相关度在[0.5,1]之间我们才考虑,那么,对IPD_SET_1中指定的某个IPD,计算它与IPD_SET_2中所有IPD的r系数,若最大的r系数落在[0.5,1]区间,则其对应的IPD是最相关的。
下面实现一个IPD匹配函数,传入两个IPD集合,找出所有r系数符合给定阈值的(即认为有对应关系的)IPD:
def match(desc1, desc2, threshold = 0.5):n = len(desc1[0])count1 = len(desc1)count2 = len(desc2)d = -np.ones((count1, count2)) #每个图1的IPD,其对应的力2的IPD下标初始化为-1for i in range(count1):ipd1 = desc1[i]d1 = (ipd1 - np.mean(ipd1)) / np.std(ipd1)for j in range(count2):ipd2 = desc2[j]if ipd1.shape[0] == ipd2.shape[0]: #忽略位于边缘的IPDd2 = (ipd2 - np.mean(ipd2)) / np.std(ipd2)r = np.sum(d1 * d2) / (n - 1)if r > threshold:d[i, j] = r #i为图像1角点坐标, j为符合阈值的图像2角点坐标ndx = np.argsort(-d) #将d的列降序排列,第0列即为r系数最大的match_index_array = ndx[:, 0] #只保留第0列return match_index_array上述的函数为图1的每个IPD,从右边找到最佳的匹配(如果存在),但这还不够,因为这不代表对右边的这个IPD来说,左边的的这个IPD是它的最佳匹配,所以,如果使用两向匹配,互相认为是最佳的,我们才认为是对应关系,这样效果会更好一些,双向匹配的函数实现:
def match_twosided(desc1, desc2, threshold = 0.5):m_12 = match(desc1, desc2, threshold)m_21 = match(desc2, desc1, threshold)for i,j in enumerate(m_12):if j >= 0 and m_21[j] != i:m_12[i] = -1 #非双向匹配的,置为-1,上层应该忽略之return m_12例子
下面代码使用以上的两向匹配方法找出两张图像的对应点,并用白色线连接起来,看一下效果,两张图像是并排显示的:

从图中可以看出,两个图像中的广州塔上的关键角点基本能找到对应的位置,但图像的底部即建筑物的角点,与右图的建筑物连接起来,即使它们不是相同的建筑物,这是因为这些角点看起来很像,准确点讲,相关度(r系数)很高,所以被认为是对应点。
从这个例子也可以看出,要准确的找到对象在图像间的对应点,还需要考虑一些因素,来使效果更佳:
为兴趣点定义一个范围,比如上面例子,如果只关注塔尖的兴趣点,得出的效果令人满意
在寻找对应关系时,可限定对应点的y坐标的距离不能超过一定范围(如50个像素,根据实际应用而定),这样可以有效排除一些虽然r系数高,但事实上不对应的点。
代码如下,注意点的疏密可以通过参数微调:
from PIL import Image
import matplotlib.pyplot as plt
import numpy as np
from scipy.ndimage import filters
from skimage.feature import corner_peaksdef harris_eps(im, sigma=3): #harris角检测,见上个笔记imx = np.zeros(im.shape)filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)imy = np.zeros(im.shape)filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)Wxx = filters.gaussian_filter(imx*imx,sigma)Wxy = filters.gaussian_filter(imx*imy,sigma)Wyy = filters.gaussian_filter(imy*imy,sigma)Wdet = Wxx*Wyy - Wxy**2Wtr = Wxx + Wyyreturn Wdet * 2 / (Wtr + 1e-06)# def get_desc(image, filtered_coords, wid = 5):
# 省略,见上文# def match_twosided(desc1, desc2, threshold = 0.5):
# 省略,见上文im1 = np.array(Image.open('tower-left.jpg').convert('L'))
im2 = np.array(Image.open('tower-right.jpg').convert('L'))coords_1 = corner_peaks(harris_eps(im1, sigma=1), min_distance=3, threshold_abs=0, threshold_rel=0.1)
coords_2 = corner_peaks(harris_eps(im2, sigma=1), min_distance=3, threshold_abs=0, threshold_rel=0.1)desc1 = get_desc(im1, coords_1, wid=6)
desc2 = get_desc(im2, coords_2, wid=6)match_index_array = match_twosided(desc1, desc2, threshold=0.5)im3 = np.concatenate((im1, im2), axis=1) #将两个图像左右合并成一个,以便显示
plt.gray()
plt.imshow(im3)for ipd_index_1,ipd_index_2 in enumerate(match_index_array):if ipd_index_2 != -1:x = [coords_1[ipd_index_1][4], coords_2[ipd_index_2][5] + im1.shape[1]]y = [coords_1[ipd_index_1][0], coords_2[ipd_index_2][0]]if np.abs(y[0] - y[1]) < 50: #这里限制了对应点之间的y坐标距离plt.plot(x, y, 'w', alpha=0.5) #连接两个对应点plt.plot(coords_1[:, 1], coords_1[:, 0], '+r', markersize=5) #画图1角点坐标
plt.plot(coords_2[:, 1] + im1.shape[1], coords_2[:, 0], '+r', markersize=5) #画图2角点坐标
plt.axis('off')
plt.show()小结
从实例中可以看到,本文使用的描述点的和匹配的方法,存在误配的情况,矩形大小的设置也会影响匹配的结果,而且它也不适用于在图像被旋转和缩放的情况下使用,近年,关于这方面的研究也在不断取得进步,下一笔记将介绍一种称为尺度不变特征转换(Scale-invariant feature transform 或 SIFT)的算法,此算法应用非常广。
你还可以查看我的其它笔记
参考资料
wiki 皮尔逊积矩相关系数
Programming Computer Vision with Python (学习笔记十)相关推荐
- Programming Computer Vision with Python (学习笔记一)
转载自:http://segmentfault.com/a/1190000003941588 介绍 <Programming Computer Vision with Python>是一本 ...
- Programming Computer Vision with Python【学习笔记】【第一章】
第1章 基本的图像操作和处理 1.1 PIL:Python图像处理类库 1.1.1 转换图像格式--save()函数 1.1.2 创建缩略图 1.1.3 复制并粘贴图像区域 1.1.4 调整尺寸和旋转 ...
- Programming Computer Vision with Python (学习笔记十二)
ORB(Oriented FAST and Rotated BRIEF)可用来替代SIFT(或SURF),它对图像更具有抗噪特性,是一种特征检测高效算法,其速度满足实时要求,可用于增强图像匹配应用. ...
- Programming Computer Vision with Python (学习笔记十二) 1
ORB(Oriented FAST and Rotated BRIEF)可用来替代SIFT(或SURF),它对图像更具有抗噪特性,是一种特征检测高效算法,其速度满足实时要求,可用于增强图像匹配应用. ...
- Programming Computer Vision with Python (学习笔记七)
数学形态学(mathematical morphology)关注的是图像中的形状,它提供了一些方法用于检测形状和改变形状.起初是基于二值图像提出的,后来扩展到灰度图像.二值图像就是:每个像素的值只能是 ...
- Programming Computer Vision with Python (学习笔记四)
上一个笔记主要是讲了PCA的原理,并给出了二维图像降一维的示例代码.但还遗留了以下几个问题: 在计算协方差和特征向量的方法上,书上使用的是一种被作者称为compact trick的技巧,以及奇异值分解 ...
- Programming Computer Vision with Python (学习笔记十一)
尺度不变特征变换(Scale-invariant feature transform, 简称SIFT)是图像局部特征提取的现代方法--基于区域/图像块的分析.在上篇笔记里我们使用的图像之间对应点的匹配 ...
- Programming Computer Vision with Python (学习笔记九)
角检测(Corner detection)是指检测图像中具有代表性的(我们感兴趣的)角点,一般讲为形状或边缘的拐角处,这些点可以大略标记对象在图像中的轮廓和位置,如果从一个图像序列中检测每个图像的角点 ...
- Programming Computer Vision with Python (学习笔记八)
图像去噪(Image Denoising)的过程就是将噪点从图像中去除的同时尽可能的保留原图像的细节和结构.这里讲的去噪跟前面笔记提过的去噪不一样,这里是指高级去噪技术,前面提过的高斯平滑也能去噪,但 ...
最新文章
- php邮箱群发,php异步群发邮件
- 工业云计算在中国工业领域的发展与应用趋势
- zephir开发的扩展“wudimei框架”之数据库使用方法
- sql server紧急状态下登录脚本
- ffmpeg解码流程 turorial5详解
- java 覆盖和隐藏_Java方法的覆盖与隐藏的区别分析
- 【vue】---vue中使用async+await出现的问题及解决方案
- LINQ解决依据某个字段去重
- Kotlin的匿名方法实现接口回调
- js中0.1+0.2 与0.3的对比
- 软件工程导论-软件工程概论(学习笔记)
- Mac电脑清空搜狗输入法联想记忆词库
- ROS笔记——创建简单的主题发布节点和主题订阅节点
- 破解mariadb数据库密码
- waterMark相关
- 最新emoji表情代码大全_周六最美早晨好问候语图片大全 早晨好图片祝福 最新早上好问候动态表情图片...
- 两个实打实干活的同事离职了,老板连谈都没谈,一句挽留都没有,你怎么看
- Excel2007中固定表头或列
- 免费SCA工具横向测评
- RAD(Rapid Application Develop,快速应用开发)模型
热门文章
- Spring源码解析之:Spring Security启动细节和工作模式--转载
- 源码分析shiro认证授权流程
- android 消息循环机制--looper handler
- 迪拜与IBM合作推出基于区块链的商业注册系统
- 灰度图像--图像增强 平滑之均值滤波、高斯滤波
- 能做存储的超级计算机——任宇翔和以色列团队的创业故事
- php中系统函数的特征,php 常用的系统函数
- mysql对数据库进行备份吗_怎么对MySQL数据库进行备份与恢复
- Spring Cloud【Finchley】-03将微服务注册到Eureka Server上 + 为Eureka Server添加用户认证
- MyBatis-10MyBatis注解方式之Provider注解