11(0)-AirSim+四旋翼仿真-人工势场法避障
1.基本原理
人工势场法的基本原理为,根据地图内障碍物、目标点等的分布,构造一个人工势场,无人机由势能较高的位置向势能较低的位置移动。就好比是一个电场,电场内不同位置的电势能不同,对带电物体产生的力也不同,但这个力对物体运动的影响一定是由高势能到低势能的。只不过电场内的势能是物理上定义的,而人工势场的势能是根据我们的需求自己定义的。只需要定义合适的势函数,使得障碍物附近的势能大、目标点附近的势能小,就可以引导无人机飞往目标点而原理障碍物。这种方法不依赖于全局的障碍物信息,可以实现局部范围内的障碍物检测+避障。
这里使用常见的势函数定义,在python实现避障仿真,并参考文献[^1]中方法,针对人工势场法可能出现的局部极小值等问题进行改进。
2.势函数和势场
在单机飞行的避障中,对无人机产生影响的因素有障碍物和目标点,如果是多机编队还需考虑机间的影响。这里只考虑障碍物产生的斥力场和目标点产生的引力场。
常见的斥力势函数为
Urep(P)={12η(1d(P,Pob)−1Q)2,ifd(P,Pob)≤Q0,ifd(P,Pob)>QU_{rep}(P)= \left\{\begin{aligned} \frac{1}{2}\eta(\frac{1}{d(P,P_{ob})}-\frac{1}{Q})^2,if\quad d(P,P_{ob})\leq Q \\0,if\quad d(P,P_{ob})> Q \end{aligned}\right. Urep(P)=⎩⎨⎧21η(d(P,Pob)1−Q1)2,ifd(P,Pob)≤Q0,ifd(P,Pob)>Q
其中PPP为无人机当前坐标,PobP_{ob}Pob为被计算势函数的障碍物坐标;QQQ为障碍物作用范围,该范围外的障碍物不会对无人机飞行产生影响;η\etaη为比例系数。
常见的引力势函数为
Uatt(P)=12ξd2(P,Pgoal)U_{att}(P)=\frac{1}{2}\xi d^2(P,P_{goal}) Uatt(P)=21ξd2(P,Pgoal)
其中PPP为无人机当前坐标,PgoalP_{goal}Pgoal为目标点坐标,ξ\xiξ为比例系数。
在以上势函数的定义下,物体距离目标点越近,目标点产生的引力势越小;物体距离障碍物越近,障碍物产生的引力势越大。物体向势较小的位置移动,故能接近目标点而远离障碍物。
得到势场内势的分布后,可以通过两种方法引导无人机飞行。一种为计算无人机周边位置的势,以势能最小的位置作为下一位置,由于只使用位置控制而不考虑速度和加速度,故在复杂场景下使用这种方法,得到的仿真轨迹不平滑。
另一种方法为对势能计算负梯度得到下降方向,以该方向作为加速度的方向,通过加速度-速度-位置的方法实现控制。具体计算方法为
Fatt=−∇Uatt(P)=−ξ(P−Pgoal)Frepi=−∇Urep(P)={η(1d(P,Pob)−1Q)⋅1d(P,Pob)3⋅(P−Pob),ifd(P,Pob)≤Q0,ifd(P,Pob)>QFrep=∑iFeqpi\begin{align} F_{att}&=-\nabla U_{att}(P)=-\xi(P-P_{goal}) \\F_{rep}^i&=-\nabla U_{rep}(P)= \left\{\begin{aligned} \eta(\frac{1}{d(P,P_{ob})}-\frac{1}{Q})·\frac{1}{d(P,P_{ob})^3}·(P-P_{ob}),if\quad d(P,P_{ob})\leq Q \\0,if\quad d(P,P_{ob})> Q \end{aligned}\right. \\F_{rep}&=\sum_i F_{eqp}^i \end{align} FattFrepiFrep=−∇Uatt(P)=−ξ(P−Pgoal)=−∇Urep(P)=⎩⎨⎧η(d(P,Pob)1−Q1)⋅d(P,Pob)31⋅(P−Pob),ifd(P,Pob)≤Q0,ifd(P,Pob)>Q=i∑Feqpi
3.方法改进
如果仅使用以上的方法,笔者遇到的主要问题有:
局部极小值,这是梯度下降算法中的一个常见问题。某一位置处势能低于其周边所有点,但是它并不是目标点,就好比是一个小球自上而下滚落,途中落入一个小坑,如下图所示(图片来源[^2])。由于物体移动的趋势为向势能更低处,所以此时它无论如何是无法离开这个极小值点的。

或者是如下图所示的情况,障碍物产生的斥力和目标点产生的引力方向相反,
物体没有纵向的力,无法越过障碍物。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-b5jM8Ghv-1658911680145)(https://cdn.jsdelivr.net/gh/kun-k/blogweb/imageimage-20220715112653149.png)]
目标点与障碍物过于接近时,物体总是无法到达。由于障碍物存在斥力,目标点存在引力,如果此时斥力大于引力,则物体只能在目标点附近徘徊。如果设置参数、调小引力,则可能导致物体在移动过程中与障碍物过近或撞上障碍物。
目标点产生的势与距离正相关,物体距离目标点很远时,引力远大于斥力,导致斥力相对小、避障效果差。
接下来针对以上3个问题设计解决方案。
针对局部极小值问题,首先需对是否陷入局部极小进行检测,方法为在时间ttt内计算物体的位移,如果该位移小于某一阈值,则认为陷入局部极小值。论文[^1]中提出的方法为,计算时间ttt内物体相对目标点的位移
Vra=ΔXt=∣∣P0−PG∣∣−∣∣P1−PG∣∣tV_{ra}=\frac{\Delta X}{t}=\frac{||P_0-P_G||-||P_1-P_G||}{t} Vra=tΔX=t∣∣P0−PG∣∣−∣∣P1−PG∣∣
当VraV_{ra}Vra小于一阈值时认为陷入局部极小值。笔者尝试了两种解决方案。第一种为随机游走,在陷入局部极小值后物体随意改变移动方向一次,一段时间后再次进行判断。在很多情况下,这种方法可以时物体最终走出局部极小值点,但是由于移动方向是随机的,物体往往需要徘徊一段时间后才能离开。
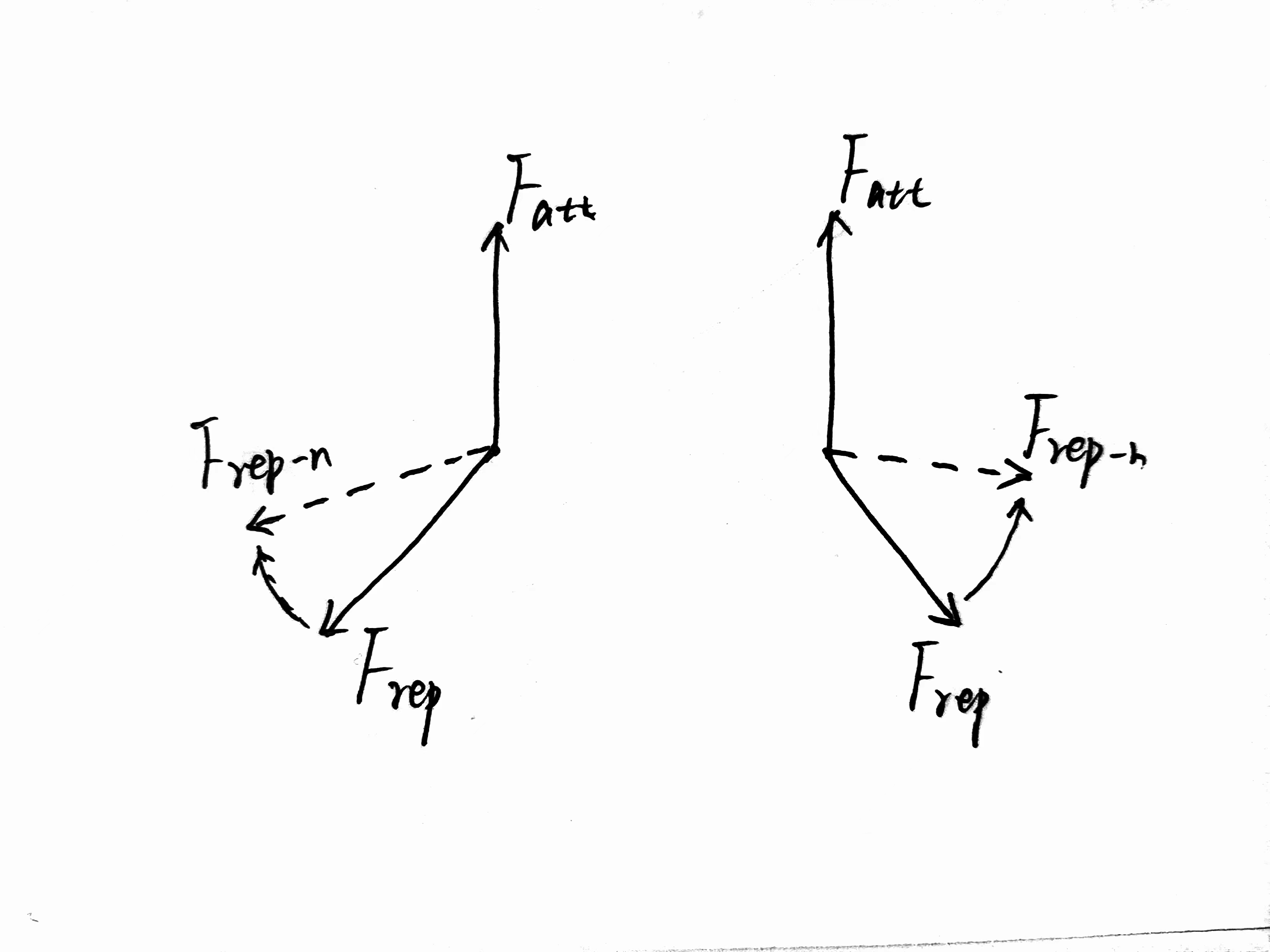
第二种方法为论文[^1]中的方法,首先有计划地改变斥力的方向。
Frep−ni=[cosθ−sinθsinθcosθ]FrepiF_{rep-n}^i= \begin{bmatrix} cos\theta&-sin\theta\\sin\theta&cos\theta \end{bmatrix}F_{rep}^i Frep−ni=[cosθsinθ−sinθcosθ]Frepi
即将每个斥力都逆时针旋转一个角度θ\thetaθ。同时对引力进行调整
Kv=3l2l+VraKd=3⋅e−(∣∣P−PG∣∣−0.5)22+1Ke≥1Fatt−n=KvKdKeFattK_v=\frac{3l}{2l+V_{ra}} \\K_d=3·e^{-\frac{(||P-P_G||-0.5)^2}{2}}+1 \\K_e\geq1 \\F_{att-n}=K_vK_dK_eF_{att} Kv=2l+Vra3lKd=3⋅e−2(∣∣P−PG∣∣−0.5)2+1Ke≥1Fatt−n=KvKdKeFatt
其中,lll为移动步长,即无斥力影响下每个时间步的位移。而VraV_{ra}Vra总是小于步长的,所以KvK_vKv总是大于1,且随着VraV_{ra}Vra的减小而增大。在局部极小中起到的效果为,当物体陷入局部极小,VraV_{ra}Vra会减小,KvK_vKv增大,进而使引力的影响增大。同时斥力的方向改变,起到的效果示意如下,图片取自参考论文中。此外,针对θ\thetaθ的选取,这里再做一些改进。论文中选择了θ=60°\theta=60°θ=60°对上图的情况进行测试,得到的效果很好。但是在很多情况下,固定角度θ\thetaθ不能离开局部极小值,陷入局部游走,或得到的解不理想,如下图所示的情况:
左侧是在θ=60°\theta=60°θ=60°下求解的情况,右侧为θ=−60°\theta=-60°θ=−60°,显然右侧的情况更好一些。考虑到θ\thetaθ的作用为增加侧向的力,使物体沿侧向离开障碍物的趋势更大,可以根据引力和斥力的方向设计θ\thetaθ的正负。如下图所示,沿逆时针方向,引力与斥力的角度小于180°时,斥力逆时针旋转,否则顺时针旋转。
目标点与障碍物接近的问题,1.中的参数KdK_dKd可以解决该问题。
KdK_dKd与物体距离目标点的距离相关,物体距离目标点的距离接近0.50.50.5时,KdK_dKd的值会比较大,而物体远离目标点时,KdK_dKd指数减小至1。绘制KdK_dKd关于距离的变换图像为
![]()
故当物体距离目标点很近时,引力的作用显著增大,障碍物的作用相对减小。可以根据实际需求适当调整KdK_dKd中的参数。
- 目标点产生的势与距离成正相关,导致距离很远时斥力的作用相对小,避障效果差。一种常见的解决方法为,为斥力势乘以一个系数∣∣Pob,Pgoal∣∣2k||P_{ob},P_{goal}||_2^k∣∣Pob,Pgoal∣∣2k,kkk可取2,此时相当于为斥力乘以障碍物到目标点的距离,使斥力大小也与距离相关。
4.实现过程和效果
经过以上改进后,FrepF_{rep}Frep和FattF_{att}Fatt的计算公式为:
Kv=3l2l+VraKd=3⋅e−(∣∣P−PG∣∣−0.5)22+1Ke≥1Fatt=−KvKdKe∇Uatt(P)=−ξ(P−Pgoal)K_v=\frac{3l}{2l+V_{ra}} \\K_d=3·e^{-\frac{(||P-P_G||-0.5)^2}{2}}+1 \\K_e\geq1 \\F_{att}=-K_vK_dK_e\nabla U_{att}(P)=-\xi(P-P_{goal}) Kv=2l+Vra3lKd=3⋅e−2(∣∣P−PG∣∣−0.5)2+1Ke≥1Fatt=−KvKdKe∇Uatt(P)=−ξ(P−Pgoal)
FrepF_{rep}Frep的计算公式为
Frepi=−∇Urep(P)={η(1d(P,Pob)−1Q)⋅d(Pgoal,Pob)2d(P,Pob)3⋅(P−Pob),ifd(P,Pob)≤Q0,ifd(P,Pob)>QFrep=∑iFeqpi\\F_{rep}^i=-\nabla U_{rep}(P)= \left\{\begin{aligned} \eta(\frac{1}{d(P,P_{ob})}-\frac{1}{Q})·\frac{d(P_{goal},P_{ob})^2}{d(P,P_{ob})^3}·(P-P_{ob}),if\quad d(P,P_{ob})\leq Q \\0,if\quad d(P,P_{ob})> Q \end{aligned}\right. \\F_{rep}=\sum_i F_{eqp}^i Frepi=−∇Urep(P)=⎩⎨⎧η(d(P,Pob)1−Q1)⋅d(P,Pob)3d(Pgoal,Pob)2⋅(P−Pob),ifd(P,Pob)≤Q0,ifd(P,Pob)>QFrep=i∑Feqpi
局部极小值下的FrepF_{rep}Frep为
Frep−n=[cosθ−sinθsinθcosθ]FrepF_{rep-n}= \begin{bmatrix} cos\theta&-sin\theta\\sin\theta&cos\theta \end{bmatrix}F_{rep} Frep−n=[cosθsinθ−sinθcosθ]Frep
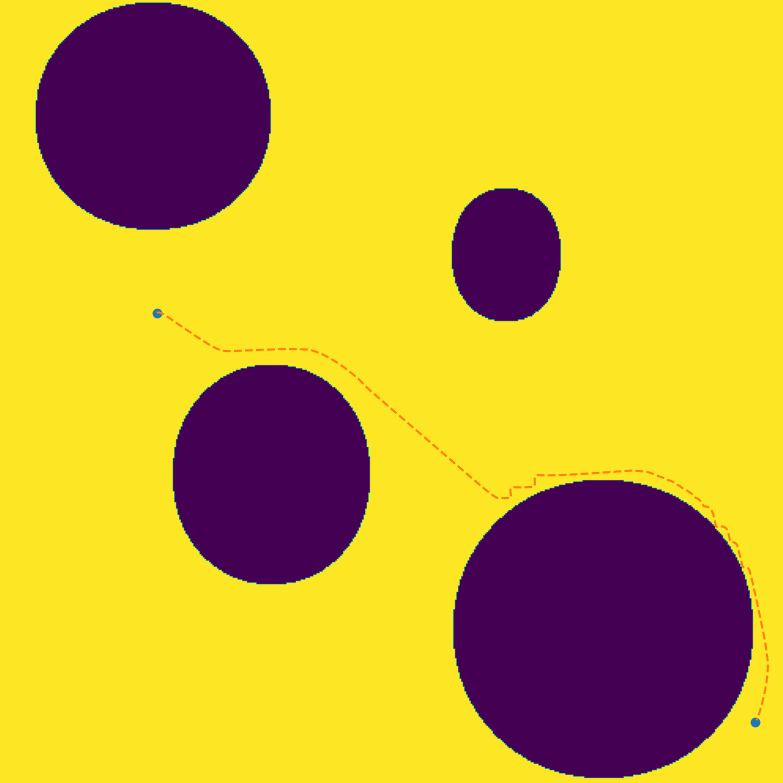
展示几组结果:
|
|
|
|---|---|
|
|
将避障与之前已经实现的轨迹规划结合,得到的结果为
|
|
|
|---|
5.代码
'''
python_avoid_APF.py
人工势场法避障的python实现
'''import math
import matplotlib.pyplot as plt
import numpy as np
import cv2'''
P 初始位置
V 初始速度
P_aim 目标点
mymap 储存有障碍物信息的地图
Kg,Kr 避障控制器参数(引力,斥力)
Q_search 搜索障碍物距离
epsilon 误差上限
Vl 速率上限
Ul 控制器输出上限
dt 迭代时间
'''
def avoid_APF(P_start, V_start, P_aim, mymap, Kg=0.5, kr=20,Q_search=20, epsilon=2, Vl=2, Ul=2, dt=0.2):def distance(A, B):return math.sqrt((A[0] - B[0]) ** 2 + (A[1] - B[1]) ** 2)def myatan(a, b):if a == 0 and b == 0:return Noneif a == 0:return math.pi / 2 if b > 0 else math.pi * 3 / 2if b == 0:return 0 if a > 0 else -math.piif b > 0:return math.atan(b / a) if a > 0 else (math.atan(b / a) + math.pi)return math.atan(b / a + 2 * math.pi) if a > 0 else math.atan(b / a) + math.pidef isClockwise(a, b):da = b - aif 0 < da < math.pi or -math.pi * 2 < da < -math.pi:return Falsereturn True# 读取初始状态P_start = np.array(P_start) # 初始位置pos_record = [P_start] # 记录位置V_start = np.array(V_start).T # 初始速度# 地图尺寸size_x = mymap.shape[0]size_y = mymap.shape[1]# 设置绘图参数plt.axis('equal')plt.xlim(0, size_x)plt.ylim(0, size_y)# 绘制地图(障碍物和航路点)for i in range(mymap.shape[0]):for j in range(mymap.shape[1]):if mymap[i][j] == 0:plt.plot(i, j, 'o', c='black')plt.plot([P_start[0], P_aim[0]], [P_start[1], P_aim[1]], 'o')# 计算周边障碍物搜素位置direction_search = np.array([-2, -1, 0, 1, 2]) * math.pi / 4# 开始飞行pos_num = 0 # 已经记录的位置的总数P_curr = P_start # 当前位置V_curr = V_startob_flag = False # 用于判断局部极小值while distance(P_curr, P_aim) > epsilon:Frep = np.array([0, 0]) # 斥力angle_curr = myatan(V_curr[0], V_curr[1])for dir in direction_search:angle_search = angle_curr + dirfor dis_search in range(Q_search):P_search = [int(P_curr[0] + dis_search * math.sin(angle_search)),int(P_curr[1] + dis_search * math.cos(angle_search))]if not (0 <= P_search[0] < size_x and # 超出地图范围,地图内障碍,均视作障碍物0 <= P_search[1] < size_y andmymap[int(P_search[0])][int(P_search[1])] == 1):d_search = distance(P_curr, P_search) # 被搜索点与当前点的距离Frep = Frep + \kr * (1 / d_search - 1 / Q_search) / (d_search ** 3) * \(P_curr - P_search) * (distance(P_search, P_aim) ** 2)breakFatt = -Kg * (P_curr - P_aim) # 计算引力if pos_num >= 1:# 计算上两个时刻物体相对终点的位移,以判断是否陷入局部极小值p0 = pos_record[pos_num - 1]p1 = pos_record[pos_num - 2]Vra = (distance(p0, P_aim) - distance(p1, P_aim)) / dtif abs(Vra) < 0.6 * Vl: # 陷入局部极小值if ob_flag == False:# 之前不是局部极小状态时,根据当前位置计算斥力偏向角thetaangle_g = myatan(Fatt[0], Fatt[1])angle_r = myatan(Frep[0], Frep[1])if angle_r == None or angle_g == None:print('111')if isClockwise(angle_g, angle_r):theta = 15 * math.pi / 180else:theta = -15 * math.pi / 180ob_flag = True# 之前为局部极小,则继续使用上一时刻的斥力偏向角thetaFrep = [math.cos(theta) * Frep[0] - math.sin(theta) * Frep[1],math.sin(theta) * Frep[0] + math.cos(theta) * Frep[1]]else: # 离开局部极小值ob_flag = Falsel = VlKv = 3 * l / (2 * l + abs(Vra))Kd = 15 * math.exp(-(distance(P_curr, P_aim) - 3) ** 2 / 2) + 1Ke = 3Fatt = Kv * Kd * Ke * Fatt # 改进引力U = Fatt + Frep # 计算合力if np.linalg.norm(U, ord=np.inf) > Ul: # 控制器输出限幅U = Ul * U / np.linalg.norm(U, ord=np.inf)V_curr = V_curr + U * dt # 计算速度if np.linalg.norm(V_curr) > Vl: # 速度限幅V_curr = Vl * V_curr / np.linalg.norm(V_curr)P_curr = P_curr + V_curr * dt # 计算位置print(P_curr, V_curr, distance(P_curr, P_aim))pos_record.append(P_curr)pos_num += 1pos_record = np.array(pos_record).Tplt.plot(pos_record[0], pos_record[1], '--')plt.show()if __name__ == "__main__":# 读取地图图像并二值化img = cv2.imread('map.png')gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)retval, dst = cv2.threshold(gray, 0, 255, cv2.THRESH_OTSU)dst = cv2.dilate(dst, None, iterations=1)dst = cv2.erode(dst, None, iterations=4) / 255avoid_APF([0, 0], [1, 1], [80, 80], dst)
代码中参数比较多,可能会有些乱,但是我都增加了注释,思路也还可以,和上面说明的算法原理都是一致的。地图我使用Windows画图工具简单绘制,黑色表示障碍物。
目前还存在一些避障失败的情况,也没有设置安全距离,比较刁钻的情况下可能会直接跨越障碍物,之后还会继续调试改进。更加复杂的情况可以则使用路径规划,设置更多航路点再进行飞行。
也还没有实现三维空间内的避障,但是根据算法原理来看,应该是可以直接扩展到三维空间内的,这部分等拿到AirSim中无人机障碍物检测的接口后再继续修改调试。
参考来源:
[1] Li H . Robotic Path Planning Strategy Based on Improved Artificial Potential Field[C]// 2020 International Conference on Artificial Intelligence and Computer Engineering (ICAICE). 2020.
[2]https://mp.weixin.qq.com/s/JwpQAXDw9Rt1vlDDIZJMXA
11(0)-AirSim+四旋翼仿真-人工势场法避障相关推荐
- 基于人工势场法的二维平面内无人机的路径规划的matlab仿真,并通过对势场法改进避免了无人机陷入极值的问题
目录 1.算法描述 2.matlab算法仿真效果 3.MATLAB核心程序 4.完整MATLAB 1.算法描述 人工势场法原理是:首先构建一个人工虚拟势场,该势场由两部分组成,一部分是目标点对移动机器 ...
- 人工势场法路径规划算法(APF)
本文主要对人工势场法路径规划算法进行介绍,主要涉及人工势场法的简介.引力和斥力模型及其推导过程.人工势场法的缺陷及改进思路.人工势场法的Python与MATLAB开源源码等方面 一.人工势 ...
- matlab人工势场法三维演示图,人工势场法(Artificial Potential Field Method)的学习
最近的工作重心回到到算法上之后,陆陆续续开始学习一些自动驾驶的控制算法.目前工作的方向主要是online trajectory generation和底层控制. 对于在线路径规划,一个重要的概念是其应 ...
- matlab人工势场法三维演示图,运动规划入门 | 5. 白话人工势场法,从原理到Matlab实现...
如何利用人工势场进行运动规划? 1.1 引力势场(Attractive Potential Field) 人工势场这个特殊的势场并不是一个单一的场,其实它是由两个场叠加组合而成的,一个是引力场,一个是 ...
- 多机器人编队人工势场法协同避障算法原理及实现
多机器人编队(二)多机器人编队人工势场法协同避障算法原理及实现 避障算法原理 避障算法仿真 多机器人协同编队需要将理论和实践紧密地结合起来,其应用包括编队队形生成.保持.变换和路径规划与避障等等都是基 ...
- 【全局规划】人工势场法(APF)
人工势场法APF clc clear close all%% 初始化车的参数 d = 3.5; % 道路标准宽度 W = 1.8; % 汽车宽度 L = 4.7; % 车长P0 = [0,-d/2,1 ...
- 基于人工势场法的路径规划
基于人工势场法的路径规划 \qquad 路径规划是移动机器人领域的一个重要组成部分,人工势场法是机器人路径规划算法中一种简单有效的方法. \qquad 势场法的基本思想是在移动机器人的工作环境中构造一 ...
- 路劲规划与轨迹跟踪学习4——人工势场法
本文参考(85条消息) [路径规划]局部路径规划算法--人工势场法(含python实现 | c++实现)_CHH3213的博客-CSDN博客_人工势场法路径规划 路径规划与轨迹跟踪系列算法学习_第6讲 ...
- 路径规划算法3 改进的人工势场法(Matlab)
目录 传统人工势场 引力势场 斥力势场 合力势场 传统人工势场法存在的问题 改进的人工势场函数 Matlab代码实现 参考链接: [1]朱伟达. 基于改进型人工势场法的车辆避障路径规划研究[D]. 江 ...
- 机器人路径规划_人工势场法
机器人路径规划_人工势场法 原理 人工势场法是由Khatib提出的一种虚拟力法.原理是:将机器人在环境中的运动视为一种机器人在虚拟的人工受力场的运动.障碍物对机器人产生斥力,目标点对机器人产生引力,引 ...
最新文章
- 小数加分数怎样计算讲解_2020人教版三年级下册数学知识点汇总带视频讲解,让孩子在学习!...
- 《剑指offer》数字在排序数组中出现的次数
- 间接寻址级别不同_被遗忘的利息税,国债与存款的利率区别,同大额存单的4点大不同...
- Ubuntu开机启动Python脚本
- (转)Flex4中的皮肤(2):Skin State
- Linux内核分析 - 网络[二]:网卡驱动接收报文
- javascript怎么禁用浏览器后退按钮
- 【转载】Android之用PopupWindow实现弹出菜单
- 关于 try catch 捕捉不到异常
- 软键盘遮挡住popupWindow问题
- 高性能服务器中的C10K问题
- 3.in_array低性能问题
- 谨慎试之:libopencv_core.so.3.4, needed by //usr/local/lib/libopencv_imgcodecs.so
- MySQL免费社区版安装步骤详解
- elipse下载安装教程
- win10+tensorflow1.14+cuda10安装踩坑
- 【软件工程】敏捷宣言
- 现成饮料的全球与中国市场2022-2028年:技术、参与者、趋势、市场规模及占有率研究报告
- 如何在 Ubuntu 20.04 / KylinOS-V10-SP1 上安装 Sublime Text 4
- MAC地址查询 Linux/Unix操作系统mac地址怎么查