【转载】Android S5PV210 fimc驱动分析 - fimc_regs.c
2019独角兽企业重金招聘Python工程师标准>>> 
本文系转载,供自己查阅。非本人作品。
转载自:http://blog.csdn.net/dahailinan/article/details/7780154
fimc_regs.c是fimc框架操作camera 硬件的接口,fimc框架把所有硬件相关的操作都放在这个文件中
- 100 int fimc_hwset_camera_source(struct fimc_control *ctrl)
- 101 {
- 102 struct s3c_platform_camera *cam = ctrl->cam;
- 103 u32 cfg = 0;
- 104
- 105 /* for now, we support only ITU601 8 bit mode */
- 106 cfg |= S3C_CISRCFMT_ITU601_8BIT;
- 107 cfg |= cam->order422;
- 108
- 109 if (cam->type == CAM_TYPE_ITU)
- 110 cfg |= cam->fmt;
- 111
- 112 cfg |= S3C_CISRCFMT_SOURCEHSIZE(cam->width);
- 113 cfg |= S3C_CISRCFMT_SOURCEVSIZE(cam->height);
- 114
- 115 writel(cfg, ctrl->regs + S3C_CISRCFMT);
- 116
- 117 return 0;
- 118 }
S3C_CISRCFMT: Camera Source Format,FIMC1 FIMC2 FIMC3各对应一个
106 设置external 摄像头支持的模式,一般来讲 AD转换芯片都是支持BT656
107 cam->order422,这里的cam代表的就是一个外部摄像头,cam->order422是在arch/arm/mach- s5pv210/mach-xxx.c中定义的,标识了external camera 像素的Y C R分量的排列方式,对于BT656来是,选择CAM_ORDER422_8BIT_YCBYCR
109 因为cam->fmt也是设置 ITU模式的,所以和106行代码是冗余的,不知作者为什么这样写
112 ~ 113 设置source水平和垂直像素数目,source可以是 camera或者FIFO input
- 159 int fimc_hwset_output_area_size(struct fimc_control *ctrl, u32 size)
- 160 {
- 161 u32 cfg = 0;
- 162
- 163 cfg = S3C_CITAREA_TARGET_AREA(size);
- 164
- 165 writel(cfg, ctrl->regs + S3C_CITAREA);
- 166
- 167 return 0;
- 168 }
CITAREA: output DMA target area register
设置output DMA的target大小,这个值并不是buffer空间的大小,而是输出图像的H_size * V_size
- 170 void fimc_wait_disable_capture(struct fimc_control *ctrl)
- 171 {
- 172 unsigned long timeo = jiffies + 20; /* timeout of 100 ms */
- 173 u32 cfg;
- 174
- 175 if (!ctrl || !ctrl->cap ||
- 176 ctrl->cap->fmt.colorspace == V4L2_COLORSPACE_JPEG)
- 177 return;
- 178
- 179 while (time_before(jiffies, timeo)) {
- 180 cfg = readl(ctrl->regs + S3C_CISTATUS);
- 181
- 182 if (0 == (cfg & S3C_CISTATUS_IMGCPTEN))
- 183 break;
- 184
- 185 msleep(10);
- 186 }
- 187
- 188 dev_dbg(ctrl->dev, "IMGCPTEN: Wait time = %d ms\n",
- 189 jiffies_to_msecs(jiffies - timeo + 20));
- 190
- 191 return;
- 192 }
在disable capture后,可以调用这个函数,来保证disable capture操作完成
S3C_CISTATUS_IMGCPTEN 标识是否image capture enable的状态
- 194 int fimc_hwset_image_effect(struct fimc_control *ctrl)
- 195 {
- 196 u32 cfg = 0;
- 197
- 198 if (ctrl->fe.ie_on) {
- 199 if (ctrl->fe.ie_after_sc)
- 200 cfg |= S3C_CIIMGEFF_IE_SC_AFTER;
- 201
- 202 cfg |= S3C_CIIMGEFF_FIN(ctrl->fe.fin);
- 203
- 204 if (ctrl->fe.fin == FIMC_EFFECT_FIN_ARBITRARY_CBCR)
- 205 cfg |= S3C_CIIMGEFF_PAT_CB(ctrl->fe.pat_cb) |
- 206 S3C_CIIMGEFF_PAT_CR(ctrl->fe.pat_cr);
- 207
- 208 cfg |= S3C_CIIMGEFF_IE_ENABLE;
- 209 }
- 210
- 211 writel(cfg, ctrl->regs + S3C_CIIMGEFF);
- 212
- 213 return 0;
- 214 }
FIMC控制器支持图片特效处理,因此fimc的V4L2 s_ctl接口提供了特效控制
CIIMGEFF寄存器控制图片的特效,具体的特效说明,参看s5pv210 datasheet
- 267 int fimc_hwset_reset(struct fimc_control *ctrl)
- 268 {
- 269 u32 cfg = 0;
- 270
- 271 cfg = readl(ctrl->regs + S3C_CISRCFMT);
- 272 cfg |= S3C_CISRCFMT_ITU601_8BIT;
- 273 writel(cfg, ctrl->regs + S3C_CISRCFMT);
- 274
- 275 /* s/w reset */
- 276 cfg = readl(ctrl->regs + S3C_CIGCTRL);
- 277 cfg |= (S3C_CIGCTRL_SWRST);
- 278 writel(cfg, ctrl->regs + S3C_CIGCTRL);
- 279 mdelay(1);
- 280
- 281 cfg = readl(ctrl->regs + S3C_CIGCTRL);
- 282 cfg &= ~S3C_CIGCTRL_SWRST;
- 283 writel(cfg, ctrl->regs + S3C_CIGCTRL);
- 284
- 285 /* in case of ITU656, CISRCFMT[31] should be 0 */
- 286 if ((ctrl->cap != NULL) && (ctrl->cam->fmt == ITU_656_YCBCR422_8BIT)) {
- 287 cfg = readl(ctrl->regs + S3C_CISRCFMT);
- 288 cfg &= ~S3C_CISRCFMT_ITU601_8BIT;
- 289 writel(cfg, ctrl->regs + S3C_CISRCFMT);
- 290 }
- 291
- 292 fimc_reset_cfg(ctrl);
- 293
- 294 return 0;
- 295 }
FIMC软件复位过程:
S5PV210 datasheet推荐使用如下初始化序列
对于ITU601: ITU601_656n置1 -> SwRst置1 -> SwRst置0
对于ITU656: ITU601_656n置1 -> SwRst置1 -> SwRst置0 -> ITU601_656置0
- 335 int fimc_hwset_camera_offset(struct fimc_control *ctrl)
- 336 {
- 337 struct s3c_platform_camera *cam = ctrl->cam;
- 338 struct v4l2_rect *rect = &cam->window;
- 339 u32 cfg, h1, h2, v1, v2;
- 340
- 341 if (!cam) {
- 342 fimc_err("%s: no active camera\n", __func__);
- 343 return -ENODEV;
- 344 }
- 345
- 346 h1 = rect->left;
- 347 h2 = cam->width - rect->width - rect->left;
- 348 v1 = rect->top;
- 349 v2 = cam->height - rect->height - rect->top;
- 350
- 351 cfg = readl(ctrl->regs + S3C_CIWDOFST);
- 352 cfg &= ~(S3C_CIWDOFST_WINHOROFST_MASK | S3C_CIWDOFST_WINVEROFST_MASK);
- 353 cfg |= S3C_CIWDOFST_WINHOROFST(h1);
- 354 cfg |= S3C_CIWDOFST_WINVEROFST(v1);
- 355 cfg |= S3C_CIWDOFST_WINOFSEN;
- 356 writel(cfg, ctrl->regs + S3C_CIWDOFST);
- 357
- 358 cfg = 0;
- 359 cfg |= S3C_CIWDOFST2_WINHOROFST2(h2);
- 360 cfg |= S3C_CIWDOFST2_WINVEROFST2(v2);
- 361 writel(cfg, ctrl->regs + S3C_CIWDOFST2);
- 362
- 363 return 0;
- 364 }
h1: Window Horizon Offset, v1: Window Vertical Offset
h2: Window Horizon Offset2, v2: Window Vertical Offset2
下面这个图很明了的解释了这几个坐标概念
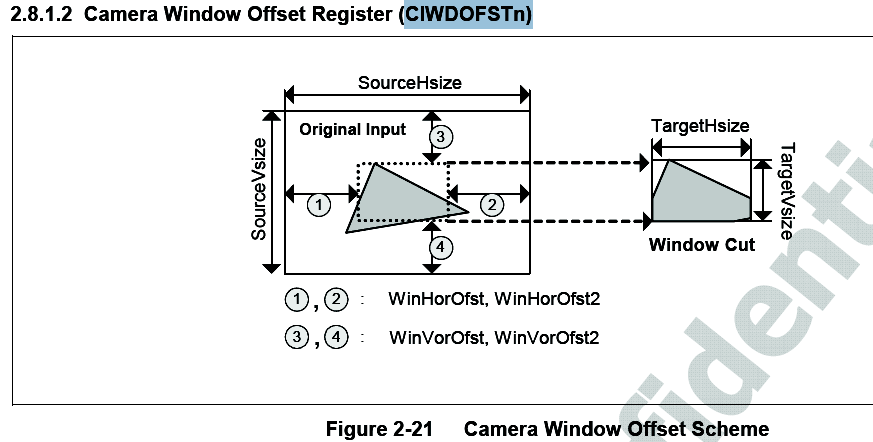
h1, h2, v1, v2这四个坐标就定义了crop的范围,上图右边部分就是crop结果
- 366 int fimc_hwset_camera_polarity(struct fimc_control *ctrl)
- 367 {
- 368 struct s3c_platform_camera *cam = ctrl->cam;
- 369 u32 cfg;
- 370
- 371 if (!cam) {
- 372 fimc_err("%s: no active camera\n", __func__);
- 373 return -ENODEV;
- 374 }
- 375
- 376 cfg = readl(ctrl->regs + S3C_CIGCTRL);
- 377
- 378 cfg &= ~(S3C_CIGCTRL_INVPOLPCLK | S3C_CIGCTRL_INVPOLVSYNC |
- 379 S3C_CIGCTRL_INVPOLHREF | S3C_CIGCTRL_INVPOLHSYNC);
- 380
- 381 if (cam->inv_pclk)
- 382 cfg |= S3C_CIGCTRL_INVPOLPCLK;
- 383
- 384 if (cam->inv_vsync)
- 385 cfg |= S3C_CIGCTRL_INVPOLVSYNC;
- 386
- 387 if (cam->inv_href)
- 388 cfg |= S3C_CIGCTRL_INVPOLHREF;
- 389
- 390 if (cam->inv_hsync)
- 391 cfg |= S3C_CIGCTRL_INVPOLHSYNC;
- 392
- 393 writel(cfg, ctrl->regs + S3C_CIGCTRL);
- 394
- 395 return 0;
- 396 }
camera sensor输出到fimc控制器的几个信号: pixclk, href(hsync), vsync。 sensor可能会设置这几个信号的极性,因此FIMC控制器端也需要和这个信号的极性匹配
具体配置需要参考sensor的输出,一般情况下无极性翻转。
对于BT656信号来说,只需要考虑pixclk的极性。
- 434 int fimc43_hwset_camera_type(struct fimc_control *ctrl)
- 435 {
- 436 struct s3c_platform_camera *cam = ctrl->cam;
- 437 u32 cfg;
- 438
- 439 if (!cam) {
- 440 fimc_err("%s: no active camera\n", __func__);
- 441 return -ENODEV;
- 442 }
- 443
- 444 cfg = readl(ctrl->regs + S3C_CIGCTRL);
- 445 cfg &= ~(S3C_CIGCTRL_TESTPATTERN_MASK | S3C_CIGCTRL_SELCAM_ITU_MASK |
- 446 S3C_CIGCTRL_SELCAM_MIPI_MASK | S3C_CIGCTRL_SELCAM_FIMC_MASK |
- 447 S3C_CIGCTRL_SELWB_CAMIF_MASK);
- 448
- 449 /* Interface selection */
- 450 if (cam->id == CAMERA_WB) {
- 451 cfg |= S3C_CIGCTRL_SELWB_CAMIF_WRITEBACK;
- 452 } else if (cam->type == CAM_TYPE_MIPI) {
- 453 cfg |= S3C_CIGCTRL_SELCAM_FIMC_MIPI;
- 454
- 455 /* C110/V210 Support only MIPI A support */
- 456 cfg |= S3C_CIGCTRL_SELCAM_MIPI_A;
- 457
- 458 /* FIXME: Temporary MIPI CSIS Data 32 bit aligned */
- 459 if (ctrl->cap->fmt.pixelformat == V4L2_PIX_FMT_JPEG)
- 460 writel((MIPI_USER_DEF_PACKET_1 | (0x1 << 8)),
- 461 ctrl->regs + S3C_CSIIMGFMT);
- 462 else
- 463 writel(cam->fmt | (0x1 << 8),
- 464 ctrl->regs + S3C_CSIIMGFMT);
- 465 } else if (cam->type == CAM_TYPE_ITU) {
- 466 if (cam->id == CAMERA_PAR_A)
- 467 cfg |= S3C_CIGCTRL_SELCAM_ITU_A;
- 468 else
- 469 cfg |= S3C_CIGCTRL_SELCAM_ITU_B;
- 470 /* switch to ITU interface */
- 471 cfg |= S3C_CIGCTRL_SELCAM_FIMC_ITU;
- 472 } else {
- 473 fimc_err("%s: invalid camera bus type selected\n", __func__);
- 474 return -EINVAL;
- 475 }
- 476
- 477 writel(cfg, ctrl->regs + S3C_CIGCTRL);
- 478
- 479 return 0;
- 480 }
FIMC提供了三个物理camera接口:
两个ITU类型的:Camera A(GPE0_0 --- GPE1_4)和Camera B(GPJ0_0 --- GPJ1_4),
一个MIPI类型的: Camera C
465 ~ 469 选择使用哪个物理camera接口,这个需要查看原理图来预设cam->id。
- 522 int fimc_hwset_jpeg_mode(struct fimc_control *ctrl, bool enable)
- 523 {
- 524 u32 cfg;
- 525 cfg = readl(ctrl->regs + S3C_CIGCTRL);
- 526
- 527 if (enable)
- 528 cfg |= S3C_CIGCTRL_CAM_JPEG;
- 529 else
- 530 cfg &= ~S3C_CIGCTRL_CAM_JPEG;
- 531
- 532 writel(cfg, ctrl->regs + S3C_CIGCTRL);
- 533
- 534 return 0;
- 535 }
对于ITU601输入如果输入数据是8bit jpeg格式(压缩格式),那么就要设置JPEG标志位,这时FIMC会忽略scaler和转换。
对于BT656来说只能是YUYV格式
- 537 int fimc_hwset_output_size(struct fimc_control *ctrl, int width, int height)
- 538 {
- 539 u32 cfg = readl(ctrl->regs + S3C_CITRGFMT);
- 540
- 541 printk(KERN_ERR "%s: width(%d), height(%d)\n", __func__, width, height);
- 542
- 543 cfg &= ~(S3C_CITRGFMT_TARGETH_MASK | S3C_CITRGFMT_TARGETV_MASK);
- 544
- 545 cfg |= S3C_CITRGFMT_TARGETHSIZE(width);
- 546 cfg |= S3C_CITRGFMT_TARGETVSIZE(height);
- 547
- 548 writel(cfg, ctrl->regs + S3C_CITRGFMT);
- 549
- 550 return 0;
- 551 }
545 ~ 546 是FIMC输出图像的width和height size, 他们不应该大于camera source height size和 source width size,当然这并不意味着FIMC的scaler没有放大功能,FIMC的scaler有放大功能
,但是放大后的尺寸不能超过source Hsize和souce Vsize
- 553 int fimc_hwset_output_colorspace(struct fimc_control *ctrl, u32 pixelformat)
- 554 {
- 555 struct s3c_platform_fimc *pdata = to_fimc_plat(ctrl->dev);
- 556 u32 cfg;
- 557
- 558 if (pdata->hw_ver != 0x40) {
- 559 if (pixelformat == V4L2_PIX_FMT_YUV444) {
- 560 cfg = readl(ctrl->regs + S3C_CIEXTEN);
- 561 cfg |= S3C_CIEXTEN_YUV444_OUT;
- 562 writel(cfg, ctrl->regs + S3C_CIEXTEN);
- 563
- 564 return 0;
- 565 } else {
- 566 cfg = readl(ctrl->regs + S3C_CIEXTEN);
- 567 cfg &= ~S3C_CIEXTEN_YUV444_OUT;
- 568 writel(cfg, ctrl->regs + S3C_CIEXTEN);
- 569 }
- 570 }
- 571
- 572 cfg = readl(ctrl->regs + S3C_CITRGFMT);
- 573 cfg &= ~S3C_CITRGFMT_OUTFORMAT_MASK;
- 574
- 575 switch (pixelformat) {
- 576 case V4L2_PIX_FMT_JPEG:
- 577 break;
- 578 case V4L2_PIX_FMT_RGB565: /* fall through */
- 579 case V4L2_PIX_FMT_RGB32:
- 580 cfg |= S3C_CITRGFMT_OUTFORMAT_RGB;
- 581 break;
- 582
- 583 case V4L2_PIX_FMT_YUYV: /* fall through */
- 584 case V4L2_PIX_FMT_UYVY: /* fall through */
- 585 case V4L2_PIX_FMT_VYUY: /* fall through */
- 586 case V4L2_PIX_FMT_YVYU:
- 587 cfg |= S3C_CITRGFMT_OUTFORMAT_YCBCR422_1PLANE;
- 588 break;
- 589
- 590 case V4L2_PIX_FMT_NV16: /* fall through */
- 591 case V4L2_PIX_FMT_NV61: /* fall through */
- 592 case V4L2_PIX_FMT_YUV422P:
- 593 cfg |= S3C_CITRGFMT_OUTFORMAT_YCBCR422;
- 594 break;
- 595
- 596 case V4L2_PIX_FMT_YUV420: /* fall through */
- 597 case V4L2_PIX_FMT_NV12: /* fall through */
- 598 case V4L2_PIX_FMT_NV12T: /* fall through */
- 599 case V4L2_PIX_FMT_NV21:
- 600 cfg |= S3C_CITRGFMT_OUTFORMAT_YCBCR420;
- 601 break;
- 602
- 603 default:
- 604 fimc_err("%s: invalid pixel format\n", __func__);
- 605 break;
- 606 }
- 607
- 608 writel(cfg, ctrl->regs + S3C_CITRGFMT);
- 609
- 610 return 0;
- 611 }
设置FIMC的输出颜色格式,FIMC支持颜色空间转换,应用程序或测试程序可以通过S_FMT ioctl指定希望的输出颜色格式
- 615 int fimc_hwset_output_rot_flip(struct fimc_control *ctrl, u32 rot, u32 flip)
- 616 {
- 617 u32 cfg, val;
- 618
- 619 cfg = readl(ctrl->regs + S3C_CITRGFMT);
- 620 cfg &= ~S3C_CITRGFMT_FLIP_MASK;
- 621 cfg &= ~S3C_CITRGFMT_OUTROT90_CLOCKWISE;
- 622
- 623 val = fimc_mapping_rot_flip(rot, flip);
- 624
- 625 if (val & FIMC_ROT)
- 626 cfg |= S3C_CITRGFMT_OUTROT90_CLOCKWISE;
- 627
- 628 if (val & FIMC_XFLIP)
- 629 cfg |= S3C_CITRGFMT_FLIP_X_MIRROR;
- 630
- 631 if (val & FIMC_YFLIP)
- 632 cfg |= S3C_CITRGFMT_FLIP_Y_MIRROR;
- 633
- 634 writel(cfg, ctrl->regs + S3C_CITRGFMT);
- 635
- 636 return 0;
- 637 }
FIMC控制器支持图片的翻转,应用层可以通过s_ctrl ioctl来设置翻转
- 690 int fimc_hwset_output_address(struct fimc_control *ctrl,
- 691 struct fimc_buf_set *bs, int id)
- 692 {
- 693 printk(KERN_ERR "%s: FIMC_ADDR_Y=0x%x, FIMC_ADDR_CB=0x%x, FIMC_ADDR_CR=0x%x\n",
- 694 __func__, bs->base[FIMC_ADDR_Y], bs->base[FIMC_ADDR_CB],
- 695 bs->base[FIMC_ADDR_CR]);
- 696 writel(bs->base[FIMC_ADDR_Y], ctrl->regs + S3C_CIOYSA(id));
- 697 writel(bs->base[FIMC_ADDR_CB], ctrl->regs + S3C_CIOCBSA(id));
- 698 writel(bs->base[FIMC_ADDR_CR], ctrl->regs + S3C_CIOCRSA(id));
- 699
- 700 return 0;
- 701 }
设置输出DMA地址,这里需要注意某些情况下,DMA物理地址需要一定的对齐方式,如果赋给FIMC的DMA地址没有满足需要的对齐方式,FIMC 驱动并不会报错,而是把输出数据写入到指定地址后符合对齐方式的地址,这样就导致DMA地址前面一部分没有有效数据写入,而后面地址写入的数据又发生了错 位。
举个例子,比如DMA要求4K对齐,你赋值的地址为0x40000800,那么FIMC会越过2K字节从0x40001000开始写数据,而且会越过你假定的那个DMA buffer边界,写入不可知的区域(这个我纯属猜测)
FIMC既支持packed格式的输出,此时仅需要设置FIMC_ADDR_Y;也支持planer格式的输出,此时还需要设置FIMC_ADDR_CB和FIMC_ADDR_CR
- 703 int fimc_hwset_output_yuv(struct fimc_control *ctrl, u32 pixelformat)
- 704 {
- 705 u32 cfg;
- 706
- 707 cfg = readl(ctrl->regs + S3C_CIOCTRL);
- 708 cfg &= ~(S3C_CIOCTRL_ORDER2P_MASK | S3C_CIOCTRL_ORDER422_MASK |
- 709 S3C_CIOCTRL_YCBCR_PLANE_MASK);
- 710
- 711 switch (pixelformat) {
- 712 /* 1 plane formats */
- 713 case V4L2_PIX_FMT_YUYV:
- 714 cfg |= S3C_CIOCTRL_ORDER422_YCBYCR;
- 715 break;
- 716
- 717 case V4L2_PIX_FMT_UYVY:
- 718 cfg |= S3C_CIOCTRL_ORDER422_CBYCRY;
- 719 break;
- 720
- 721 case V4L2_PIX_FMT_VYUY:
- 722 cfg |= S3C_CIOCTRL_ORDER422_CRYCBY;
- 723 break;
- 724
- 725 case V4L2_PIX_FMT_YVYU:
- 726 cfg |= S3C_CIOCTRL_ORDER422_YCRYCB;
- 727 break;
- 728
- 729 /* 2 plane formats */
- 730 case V4L2_PIX_FMT_NV12: /* fall through */
- 731 case V4L2_PIX_FMT_NV12T: /* fall through */
- 732 case V4L2_PIX_FMT_NV16:
- 733 cfg |= S3C_CIOCTRL_ORDER2P_LSB_CBCR;
- 734 cfg |= S3C_CIOCTRL_YCBCR_2PLANE;
- 735 break;
- 736
- 737 case V4L2_PIX_FMT_NV21: /* fall through */
- 738 case V4L2_PIX_FMT_NV61:
- 739 cfg |= S3C_CIOCTRL_ORDER2P_LSB_CRCB;
- 740 cfg |= S3C_CIOCTRL_YCBCR_2PLANE;
- 741 break;
- 742
- 743 /* 3 plane formats */
- 744 case V4L2_PIX_FMT_YUV422P: /* fall through */
- 745 case V4L2_PIX_FMT_YUV420:
- 746 cfg |= S3C_CIOCTRL_YCBCR_3PLANE;
- 747 break;
- 748 }
- 749
- 750 writel(cfg, ctrl->regs + S3C_CIOCTRL);
- 751
- 752 return 0;
- 753 }
YUV有很多种格式,可以分为两大类: 打包格式(packed)和平面格式(planer),打包格式是YUV分量放在一个数组中,相邻的几个分量组成一个像素的。而后者使用两个或者三个分量 数组,两个分量数组是将Y和UV分量分开,三个分量数组则是将YUV分量放在不同的数组中
- 755 int fimc_hwset_output_scan(struct fimc_control *ctrl,
- 756 struct v4l2_pix_format *fmt)
- 757 {
- 758 struct s3c_platform_fimc *pdata = to_fimc_plat(ctrl->dev);
- 759 u32 cfg;
- 760
- 761 /* nothing to do: FIMC40 not supported interlaced and weave output */
- 762 if (pdata->hw_ver == 0x40)
- 763 return 0;
- 764
- 765 cfg = readl(ctrl->regs + S3C_CISCCTRL);
- 766 cfg &= ~S3C_CISCCTRL_SCAN_MASK;
- 767
- 768 if (fmt->field == V4L2_FIELD_INTERLACED ||
- 769 fmt->field == V4L2_FIELD_INTERLACED_TB) {
- 770 cfg |= S3C_CISCCTRL_INTERLACE;
- 771 printk(KERN_ERR "%s: set S3C_CISCCTRL_INTERLACE\n", __func__);
- 772 }
- 773 else
- 774 cfg |= S3C_CISCCTRL_PROGRESSIVE;
- 775
- 776 writel(cfg, ctrl->regs + S3C_CISCCTRL);
- 777
- 778 cfg = readl(ctrl->regs + S3C_CIOCTRL);
- 779 cfg &= ~S3C_CIOCTRL_WEAVE_MASK;
- 780
- 781 if ((ctrl->cap) && (fmt->field == V4L2_FIELD_INTERLACED_TB))
- 782 cfg |= S3C_CIOCTRL_WEAVE_OUT;
- 783
- 784 writel(cfg, ctrl->regs + S3C_CIOCTRL);
- 785
- 786 return 0;
- 787 }
776 根据输出field格式来设定FIMC的扫描方式,
设置为S3C_CISCCTRL_INTERLACE, 如果输入为progressive,则输出半帧数据;如果输入为interlace,输出仅为1/4帧,在s5pv210的datasheet中也注明了这种情况下输入不能为interlace
设置为S3C_CISCCTRL_PROGRESSIVE,如果输入为interlace,则输出半帧数据; 如果输入是progressive,则输出是整帧数据。
781 ~ 782 先了解下V4L2_FIELD_INTERLACED_TB和 V4L2_FIELD_INTERLACED的区别, 设置这个标志后,even field(top field) 被输出而odd field被忽略掉
具体原因我开始猜测了:把even field和odd field交织在一起是会产生毛刺的,所以有时会仅取一场 even field和 odd field之一来代表一帧数据。
这里我比较奇怪的是为什么没有处理V4L2_FIELD_INTERLACED_BT
- 789 int fimc_hwset_input_rot(struct fimc_control *ctrl, u32 rot, u32 flip)
- 790 {
- 791 u32 cfg, val;
- 792
- 793 cfg = readl(ctrl->regs + S3C_CITRGFMT);
- 794 cfg &= ~S3C_CITRGFMT_INROT90_CLOCKWISE;
- 795
- 796 val = fimc_mapping_rot_flip(rot, flip);
- 797
- 798 if (val & FIMC_ROT)
- 799 cfg |= S3C_CITRGFMT_INROT90_CLOCKWISE;
- 800
- 801 writel(cfg, ctrl->regs + S3C_CITRGFMT);
- 802
- 803 return 0;
- 804 }
796 调用fimc_mapping_rot_flip把 for flip映射为寄存器参数值,但是由于FIMC的input仅仅支持90 degree clockwise rotate,所以算出来的 flip值实际上没有用的,而且FIMC子系统并没有真正调用这个函数,就是一摆设
- 838 int fimc43_hwset_scaler(struct fimc_control *ctrl, struct fimc_scaler *sc)
- 839 {
- 840 u32 cfg = readl(ctrl->regs + S3C_CISCCTRL);
- 841 u32 cfg_ext = readl(ctrl->regs + S3C_CIEXTEN);
- 842
- 843 cfg &= ~(S3C_CISCCTRL_SCALERBYPASS |
- 844 S3C_CISCCTRL_SCALEUP_H | S3C_CISCCTRL_SCALEUP_V |
- 845 S3C_CISCCTRL_MAIN_V_RATIO_MASK |
- 846 S3C_CISCCTRL_MAIN_H_RATIO_MASK |
- 847 S3C_CISCCTRL_CSCR2Y_WIDE |
- 848 S3C_CISCCTRL_CSCY2R_WIDE);
- 849
- 850 #ifdef CONFIG_VIDEO_FIMC_RANGE_WIDE
- 851 cfg |= (S3C_CISCCTRL_CSCR2Y_WIDE | S3C_CISCCTRL_CSCY2R_WIDE);
- 852 #endif
- 853
- 854 if (sc->bypass)
- 855 cfg |= S3C_CISCCTRL_SCALERBYPASS;
- 856
- 857 if (sc->scaleup_h)
- 858 cfg |= S3C_CISCCTRL_SCALEUP_H;
- 859
- 860 if (sc->scaleup_v)
- 861 cfg |= S3C_CISCCTRL_SCALEUP_V;
- 862
- 863 cfg |= S3C_CISCCTRL_MAINHORRATIO(sc->main_hratio);
- 864 cfg |= S3C_CISCCTRL_MAINVERRATIO(sc->main_vratio);
- 865
- 866 writel(cfg, ctrl->regs + S3C_CISCCTRL);
- 867
- 868 cfg_ext &= ~S3C_CIEXTEN_MAINHORRATIO_EXT_MASK;
- 869 cfg_ext &= ~S3C_CIEXTEN_MAINVERRATIO_EXT_MASK;
- 870
- 871 cfg_ext |= S3C_CIEXTEN_MAINHORRATIO_EXT(sc->main_hratio);
- 872 cfg_ext |= S3C_CIEXTEN_MAINVERRATIO_EXT(sc->main_vratio);
- 873
- 874 writel(cfg_ext, ctrl->regs + S3C_CIEXTEN);
- 875
- 876 return 0;
- 877 }
854 FIMC仅仅在camera input 格式为JPEG时 设置sc->bypass为1, 这是因为在这种情况下图片的尺寸可能大于scaler能处理的最大尺寸
scaler是我认为比较难理解的地方,有很多莫名秒的变量,无用的变量,按我现在得出的结论,scaler部分三星开发人员写了很多垃圾代码,在作者还没撸清的前提下,我就不分析了。
- 1085 int fimc_hwset_output_rgb(struct fimc_control *ctrl, u32 pixelformat)
- 1086 {
- 1087 u32 cfg = readl(ctrl->regs + S3C_CISCCTRL);
- 1088 cfg &= ~S3C_CISCCTRL_OUTRGB_FMT_RGB_MASK;
- 1089
- 1090 if (pixelformat == V4L2_PIX_FMT_RGB32)
- 1091 cfg |= S3C_CISCCTRL_OUTRGB_FMT_RGB888;
- 1092 else if (pixelformat == V4L2_PIX_FMT_RGB565)
- 1093 cfg |= S3C_CISCCTRL_OUTRGB_FMT_RGB565;
- 1094
- 1095 writel(cfg, ctrl->regs + S3C_CISCCTRL);
- 1096
- 1097 return 0;
- 1098 }
设置output DMA RGB格式,FIMC硬件支持RGB565, RGB888和RGB666,因为V4L2没有RGB666的说法, 所以代码并不支持RGB666。
火大,看什么代码都不顺眼,为什么三桑要把output DMA RGB格式的设置放到Main-scaler control寄存器,就不能和ouput DMA YUV设置寄存器放一块
- 1100 int fimc_hwset_ext_rgb(struct fimc_control *ctrl, int enable)
- 1101 {
- 1102 u32 cfg = readl(ctrl->regs + S3C_CISCCTRL);
- 1103 cfg &= ~S3C_CISCCTRL_EXTRGB_EXTENSION;
- 1104
- 1105 if (enable)
- 1106 cfg |= S3C_CISCCTRL_EXTRGB_EXTENSION;
- 1107
- 1108 writel(cfg, ctrl->regs + S3C_CISCCTRL);
- 1109
- 1110 return 0;
- 1111 }
RGB565/RGB666 转换为 RGB888的方式,FIMC控制器支持两种转换
1. normal模式,简单的末位填充00, 000
2. extension模式,量化补偿方式,S5PV210 FIMC控制器的做法是用原始数据高位补充新数据的低位
- 1731 int fimc_hwset_output_addr_style(struct fimc_control *ctrl, u32 pixelformat)
- 1732 {
- 1733 u32 cfg = readl(ctrl->regs + S3C_CIDMAPARAM);
- 1734 cfg &= ~S3C_CIDMAPARAM_W_MODE_MASK;
- 1735
- 1736 if (pixelformat == V4L2_PIX_FMT_NV12T)
- 1737 cfg |= S3C_CIDMAPARAM_W_MODE_64X32;
- 1738 else
- 1739 cfg |= S3C_CIDMAPARAM_W_MODE_LINEAR;
- 1740
- 1741 writel(cfg, ctrl->regs + S3C_CIDMAPARAM);
- 1742
- 1743 return 0;
- 1744 }
先唠叨一下V4L2_PIX_FMT_NV12T格式,NV12T后面这个T就是Tile的缩写,NV12T就是tile版本的NV12格式,NV12T的图块包含 64 × 32 pixels.
和tile对应的就是linear,所以我们可以称V4L2_PIX_FMT_NV12为linear的NV12。
再看代码就简单了
转载于:https://my.oschina.net/u/1425390/blog/186450
【转载】Android S5PV210 fimc驱动分析 - fimc_regs.c相关推荐
- 【SemiDrive源码分析】【MailBox核间通信】46 - Android侧 RPMSG_IPCC_RPC驱动分析(下) 之 RPMSG_IPCC_RPC驱动初始化、数据收发流程分析
[SemiDrive源码分析][MailBox核间通信]46 - Android侧 RPMSG_IPCC_RPC驱动分析(下) 之 RPMSG_IPCC_RPC驱动初始化.数据收发流程分析 三. rp ...
- 【SemiDrive源码分析】【MailBox核间通信】45 - Android侧 RPMSG_IPCC_RPC驱动分析(上) 之 RPMSG设备 与 RPMSG驱动 匹配过程分析
[SemiDrive源码分析][MailBox核间通信]45 - Android侧 RPMSG_IPCC_RPC驱动分析(上) 之 RPMSG设备 与 RPMSG驱动 匹配过程分析 一. IPCC_R ...
- Android S5PV210 camera驱动(tw9912)小结
之前没接触过三星的开发板,更不了解S5PV210,TW9912这款AD芯片也是第一次接触,三星FAE又不给力(其实是没有),调试camera过程中,一会怀疑TW9912配置不对,一会怀疑三星FIMC驱 ...
- S5PV210 camera 驱动分析(android)
一.Camera 工作原理介绍 1. 结构 . 一般来说,camera 主要是由 lens 和 sensor IC 两部分组成,其中有的 sensor IC 集成 了 DSP,有的没有集成,但也需要外 ...
- (转载)Linux usbtouchscreen驱动分析
在Linux内核中自带USB触摸屏驱动,以linux-2.6.33.3\drivers\input\touchscreen.c为例,进行解析: 1.驱动加载: static int __init us ...
- 高通 android平台LCD驱动分析
目前手机芯片厂家提供的源码里包含整个LCD驱动框架,一般厂家会定义一个xxx_fb.c的源文件,注册一个平台设备和平台驱动,在驱动的probe函数中来调用register_framebuffer(), ...
- android 3d城市源码,[转载]android Gallery3D源码分析
一.布局 gallery3d的界面生成和普通的应用程序不一样.普通程序一般一个界面就是一个activity,布局用xml或代码都可以实现,界面切换是activity的切换方式:而gallery3d没有 ...
- android 副屏驱动_高通 android平台LCD驱动分析
目前手机芯片厂家提供的源码里包含整个LCD驱动框架,一般厂家会定义一个xxx_fb.c的源文件,注册一个平台设备和平台驱动,在驱动的probe函数中来调用register_framebuffer(), ...
- S5PV210 ADC驱动分析
我这里用的是mini210开发板,在其内核源码中,采用了Linux设备驱动模型中的platform虚拟总线来管理ADC设备.首先看S5PV210提供的ADC驱动接口.在plat-samsung/dev ...
- android电池(五):电池 充电IC(PM2301)驱动分析篇
android电池(五):电池 充电IC(PM2301)驱动分析篇 关键词:android 电池 电量计 PL2301任务初始化宏 power_supply 中断线程化 平台信息: 内核:linu ...
最新文章
- 阿里云accessKey如何创建?~ 2015.08.25
- openstack简易汉化
- MetaSploit攻击实例讲解------攻击445端口漏洞(kali linux 2016.2(rolling))(详细)
- CSS 七层叠层顺序(stacking level)
- python学习笔记(一)基本数据类型
- 2020年母婴消费洞察报告
- 序号47指标横向展示.xlsx_电力监控系统安全防护规定Akey310参数指标
- CSS揭秘(四)视觉效果
- paip.python3 的类使用跟python2 的不同之处
- 读书笔记系列2:《More Effective C++》
- 地图比例尺与空间分辨率之间的关系_分辨率与比例尺
- 测试覆盖:语句覆盖 判定覆盖(即分支覆盖) 条件覆盖 判定-条件覆盖 条件组合覆盖 路径覆盖
- 使用SHC命令工具加密Shell脚本
- Anaconda||install报错:CondaHTTPError: HTTP 000 CONNECTION FAILED for url <https://mirrors.tuna.tsinghu
- python_视频中语音识别转出文本
- file html5 样式,CSS小技巧之自定义个性的file表单样式
- 【源码好又多】springboot后台框架
- 遥感监测草原产草量的方法
- python做游戏辅助用到的库
- java在天猫获取图片_怎么获取天猫商品主图图片?
热门文章
- 关于apache httpd.conf脚本的理解
- 笔者带你剖析轻量级Sharding中间件——Kratos1.x
- EL表达式结合页面JSTL使用 迭代显示表格
- 80X86 汇编指令符号大全
- 系统架构师学习笔记_第十一章(下)_连载
- MySql Odbc等驱动下载地址分享下
- python中filter、map、reduce的区别
- 错误 C2280 Union : 尝试引用已删除的函数 以及 警告 C4624 “Grade”: 已将析构函数隐式定义为“已删除”的一种解决方法...
- 使用Struts2和jQuery EasyUI实现简单CRUD系统(五)——jsp,json,EasyUI的结合
- ArcEngine中打开各种数据源(WorkSpace)的连接(转)