数字图像处理(冈萨雷斯)_数字图像处理笔记总结
数字图像基础
视觉感知要素
人眼视觉基础
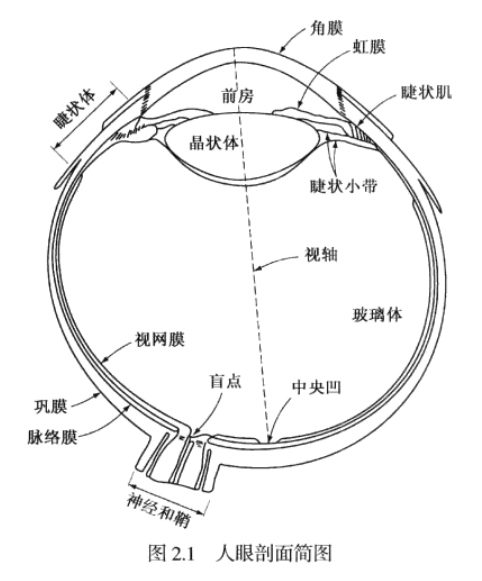
- 感光器
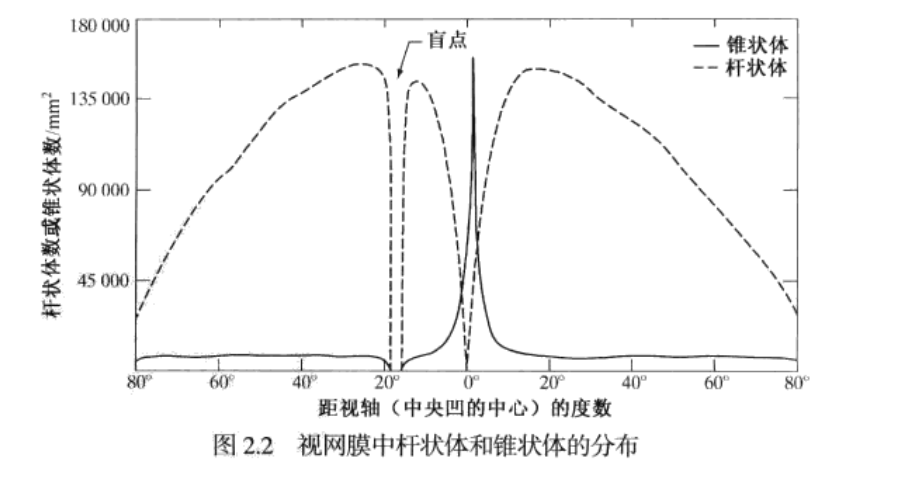
- 锥状体:主要集中在中央凹,对颜色高度敏感(白昼视觉/亮视觉)
- 杆状体:主要分布在视网膜表面,给出总体图像(暗视觉/微光视觉)
- 光强度与主观亮度的关系曲线
长实现是代表视觉系统能够适应的光强范围
在0.001-0.1mL范围中由暗视觉逐步过渡到亮视觉
BaB_aBa交叉线为眼睛能够适应这一强度级别时人眼所能感知的主观亮度范围
低于==BbB_bBb交叉线==则被感知为不可辨别的黑色
注:范围过于大或者过于小都被认为没有意义

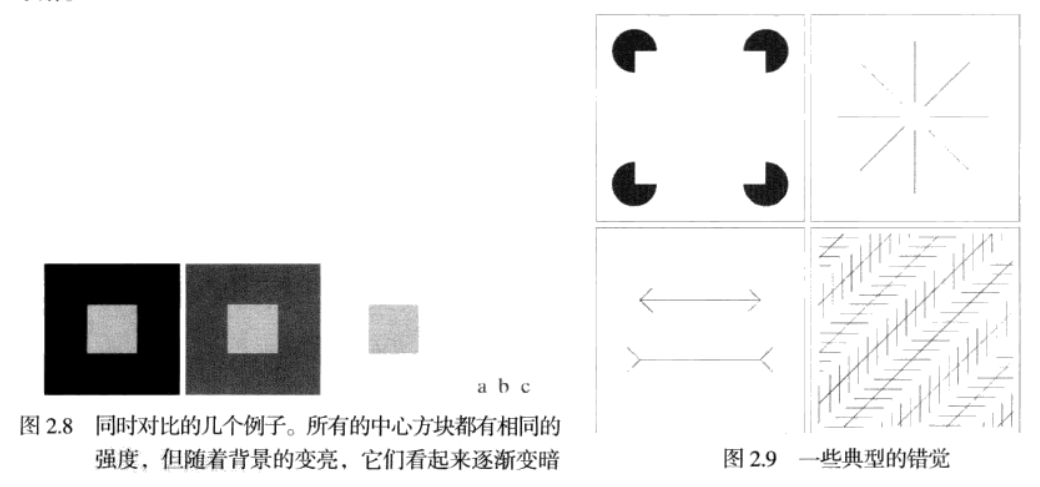
- 马赫带现象&同时对比 感知亮度并不是简单的强度的函数
针对于一个恒定的条带强度,靠经边界处我们实际感知到了带有毛边的亮度模式
同时对比
- 光和电磁波谱概念汇总
能量大小之分:无线电波(低能量光子)>微波>红外波>可见光>紫外线>X射线>伽马射线
强度和灰度级概念
- 灰度级:从黑到白的单色光的度量值范围通常称为灰度级(也通常用来表示单色光的强度)
- 灰度图像:单色图像
- 用于描述彩色光源的质量的三个基本量:发光强度、光通量、亮度
1. 要想在某一波段上对感兴趣的物体进行检测,那么需要开发一个传感器来检测对电磁波谱发射的能量; 2. 值得注意的是,一个物体的电磁波波长必须小于物体的尺寸;
传感器获取图像
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ht9k0wEy-1666168115170)(https://cdn.jsdelivr.net/gh/cr7tywzrjw/images/img/202210191027751.png)]
- 单个传感器获取图像
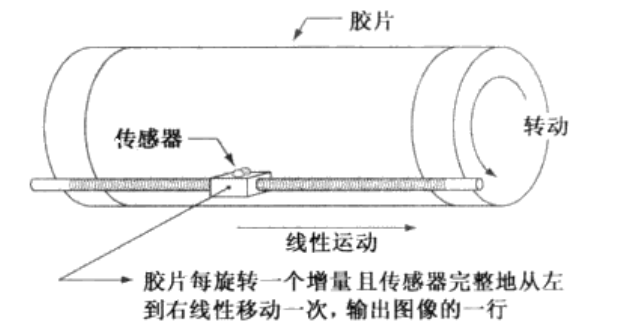
- 条带传感器获取图像
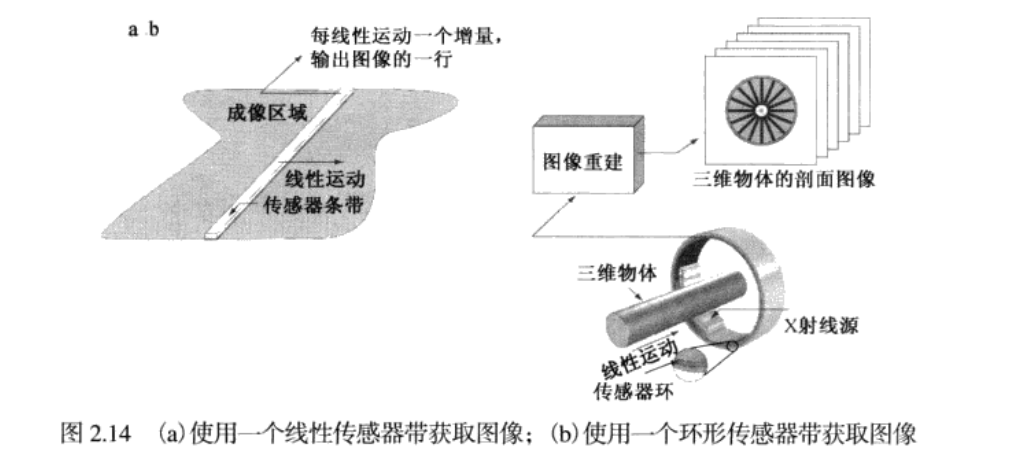
传感器阵列获取图像
一般用于数字摄像机和光敏设备
每个传感器的响应正比于投射到传感器表面的光能总量 优点:通过将能量聚集到阵列表面,以得到完整的图像
图像形成模型
形成过程
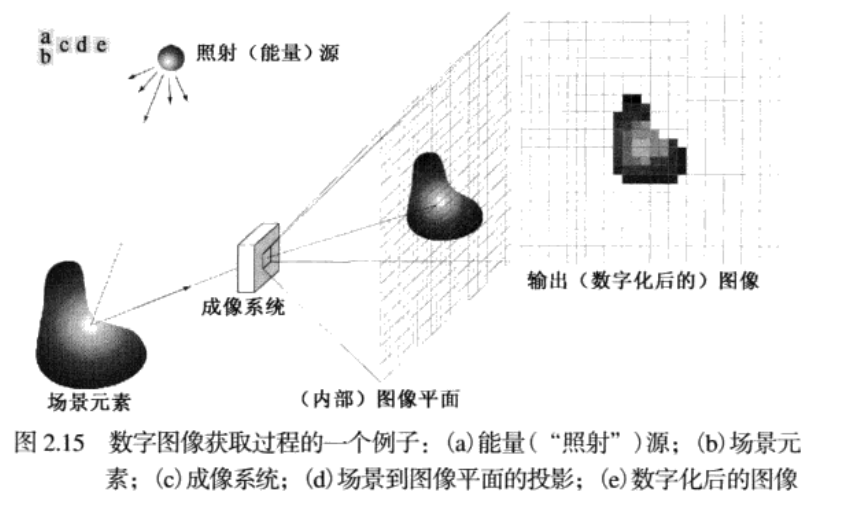
利用函数来表示,函数范围是非负且有限的
f(x,y)∣入射分量:i(x,y)∣反射分量:r(x,y)f(x, y)|入射分量:i(x, y) |反射分量:r(x, y) f(x,y)∣入射分量:i(x,y)∣反射分量:r(x,y)- 入射分量的范围在非负且有限的
- 反射分量的范围在(0, 1)区间中体现
- 其中0代表的是全吸收,1代表的是全反射
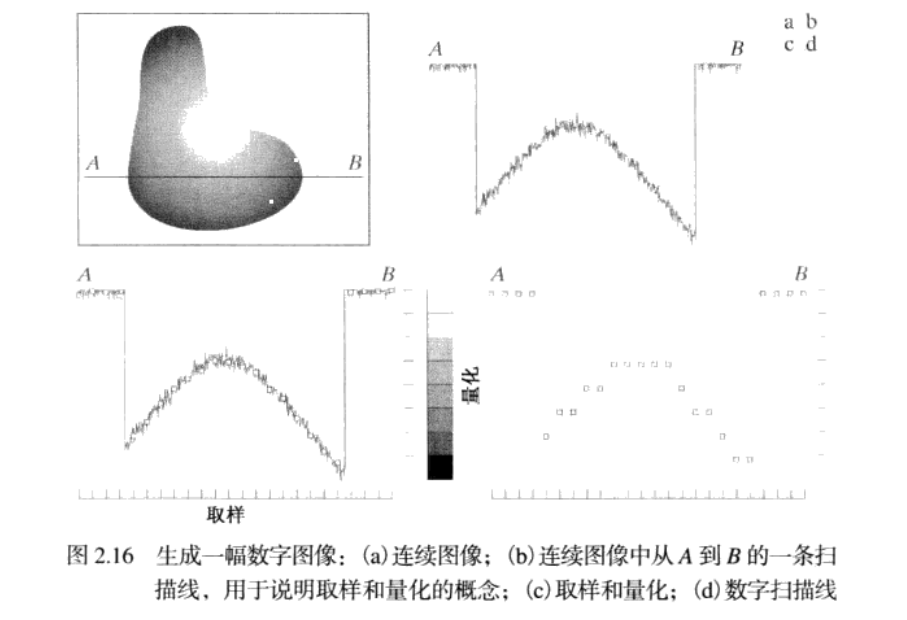
- 图像取样和量化
图形重要概念
- **取样:**对坐标值数字化
- 量化:对幅值数字化称为量化
以f(x,y)f(x, y)f(x,y)一直到f(M−1,N−1)f(M-1, N-1)f(M−1,N−1)为代表的矩阵图像表示方法
矩阵中的每一个元素称为:图像单元、图像元素、像素
数字限制
灰度值:L=2k∣0<M<∞∣0<N<∞灰度值:L = 2^k | 0 < M < \infin | 0 < N < \infin 灰度值:L=2k∣0<M<∞∣0<N<∞
饱和度&灰度
- 动态范围由系统能够表示的最低和最高灰度级来确定
- 对比度:一副图像中最高和最低灰度级间的灰度差
- 当一幅图像中像素可感知的数值有高的动态范围时,那么我们认为该图像具有高的对比度
- 存储图像需要的比特数b=M×N×kb=M \times N \times kb=M×N×k
- k比特图像定义:当一副图像具有2k2^k2k个灰度级时,该图像称为一副k比特图像
- 等偏爱曲线
- 通过改变N和K生成了图像,观察者主动按图像的质量对图像排序,最终以Nk平面中的等偏爱曲线形式汇总
- 细节增加时,等偏爱曲线会变得更加垂直 表明当需要大量细节的图像时只需要较少的灰度级
图像内插
最近邻内插法
- 这种方法把原图像中最近邻的灰度赋给每个新位置
- 直边缘的严重失真
双线性内插
- 令(x,y)为坐标,将灰度值设为v(x,y),则有v(x,y)=ax+by+d为双线性内插的实现公式令(x, y)为坐标,将灰度值设为v(x, y),则有v(x, y)=ax+by+d为双线性内插的实现公式令(x,y)为坐标,将灰度值设为v(x,y),则有v(x,y)=ax+by+d为双线性内插的实现公式
双三次内插
- 赋予点(x, y)灰度值是使用公式:
v(x,y)=∑i=03∑j=03aijxiyiv(x, y)=\sum_{i = 0}^3 \sum_{j = 0}^3 a_{ij}x^iy^i v(x,y)=i=0∑3j=0∑3aijxiyi
- 赋予点(x, y)灰度值是使用公式:
像素基本关系
相邻像素
4邻域
(x+1,y),(x−1,y),(x,y+1),(x,y−1)(x+1, y),(x-1,y),(x,y+1),(x,y-1) (x+1,y),(x−1,y),(x,y+1),(x,y−1)8邻域(包含4邻域)
(x+1,y),(x−1,y),(x,y+1),(x,y−1),(x+1,y+1),(x+1,y−1),(x−1,y+1),(x−1,y−1)(x+1, y),(x-1,y),(x,y+1),(x,y-1),(x+1,y+1),(x+1,y-1),(x-1,y+1),(x-1,y-1) (x+1,y),(x−1,y),(x,y+1),(x,y−1),(x+1,y+1),(x+1,y−1),(x−1,y+1),(x−1,y−1)
邻接性、连通性、区域、边界
- 4邻接。如果qqq在集合N4(p)N_4(p)N4(p)中,则具有VVV中数值的两个像素p,qp,qp,q是4邻接的
- 8邻接。如果qqq在集合N8(p)N_8(p)N8(p)中,则具有VVV中数值的两个像素p,qp,qp,q是8邻接的
- m邻接(混合邻接)。如果i.qi.qi.q在集合N4(p)N_4(p)N4(p)中,ii.qii.qii.q在集合ND(p)N_D(p)ND(p)中,且集合N4(p)∩N4(p)N_4(p) \cap N_4(p)N4(p)∩N4(p)中没有来自V中数值的像素,则称为m邻接
连通分量&连通集 为使我们的定义有意义,必须指定邻接类型(4/8)
- 对于SSS中的任何像素ppp,SSS中连通到该像素的像素集称为S的连通分量
- 如果SSS仅有一个连通分量,则集合S称为连通集
内边界 / 外边界
距离度量
- 欧式距离
Dc(p,q)=[(x−s)2+(y−t)2]1/2D_c(p,q) = [(x-s)^2+(y-t)^2]^{1/2} Dc(p,q)=[(x−s)2+(y−t)2]1/2
- 城市街区距离D4D_4D4
D4(p,q)=∣x−s∣+∣y−t∣D_4(p,q) = |x-s|+|y-t| D4(p,q)=∣x−s∣+∣y−t∣
- 棋盘距离D8D_8D8
D8(p,q)=max(∣x−s∣,∣y−t∣)D_8(p,q) = max(|x-s|, |y-t|) D8(p,q)=max(∣x−s∣,∣y−t∣)
矩阵基本操作
矩阵相乘 & 阵列相乘
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uIY8oxGX-1666168115171)(https://cdn.jsdelivr.net/gh/cr7tywzrjw/images/img/202210191027703.png)]
线性操作与非线性操作
算术操作
针对带噪声图像的的相加 / 平均 相加是连续积分的离散形式
图像相减经常用于增强图像之间的差
使用图像相乘和相除来校正阴影
集合和逻辑操作
- 模糊集合:模糊集合理论使用隶属度函数来实现这种概念
- 该函数使得数值可以在1-0之间进行一个逐步过渡
- 模糊集合:模糊集合理论使用隶属度函数来实现这种概念
空间操作
单像素操作
邻域操作
计算大小为m×nm \times nm×n,中心在(x,y)(x,y)(x,y)的矩形邻域中的像素的平均值
这个区域中像素的位置组成集合SxyS_{xy}Sxy
g(x,y)=1mn∑(r,c)∈Snf(r,c)g(x, y) = \frac{1}{mn} \sum_{(r,c) \in S_n} f(r, c) g(x,y)=mn1(r,c)∈Sn∑f(r,c)
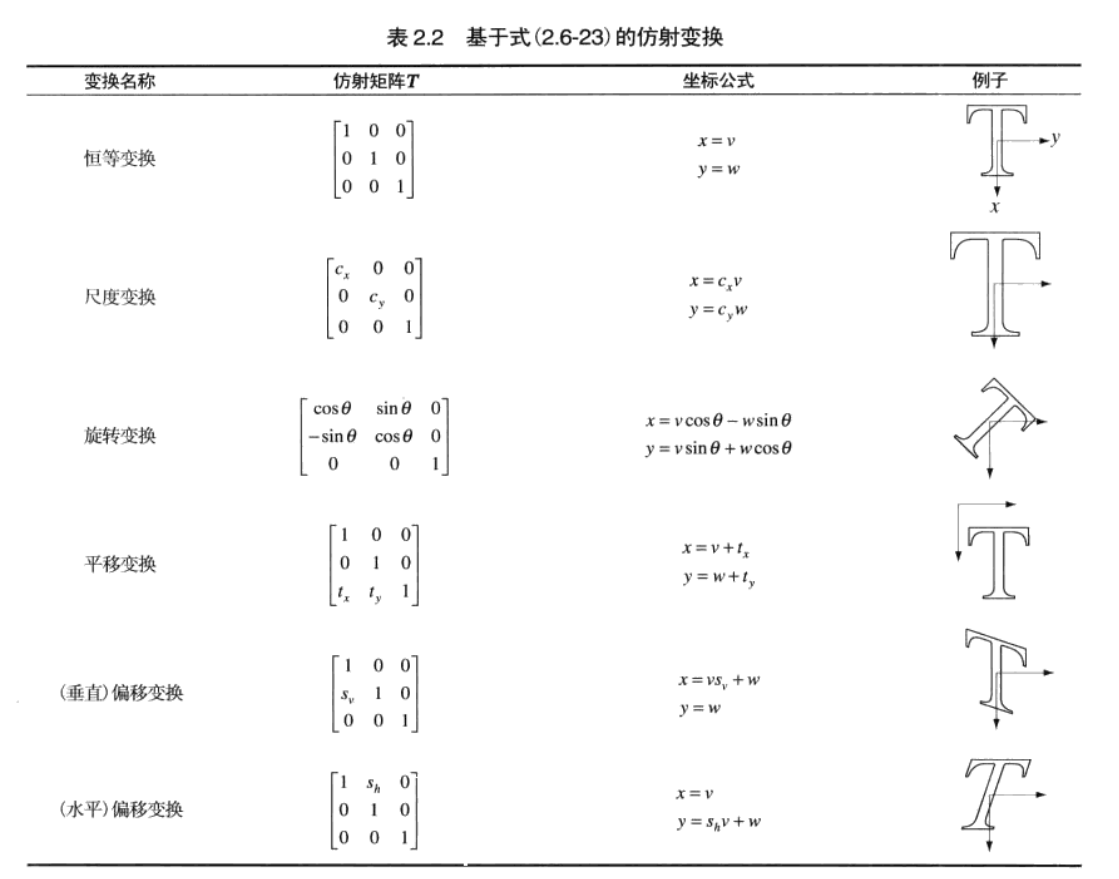
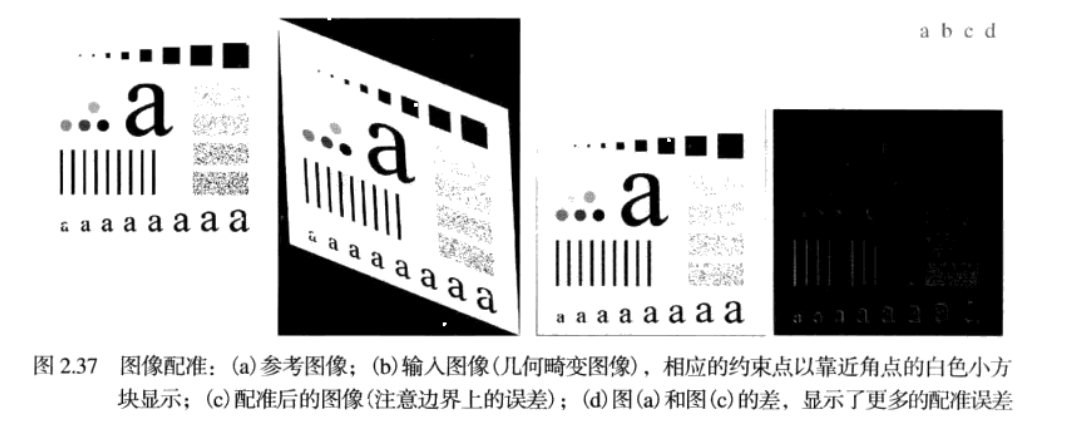
几何变换和图像配准
- 仿射变换公式
[x,y,1]=[v,w,1]T=[v,w,1]{t11t120t21t220t31t321}[x, y, 1] = [v, w, 1]T = [v, w, 1] \left\{ \begin{matrix} t_{11} & t_{12} & 0 \\ t_{21} & t_{22} & 0 \\ t_{31} & t_{32} & 1 \end{matrix} \right\} [x,y,1]=[v,w,1]T=[v,w,1]⎩⎨⎧t11t21t31t12t22t32001⎭⎬⎫
前向映射以及反向映射
- 前向映射:在每个位置(v,w)(v, w)(v,w)直接计算输出图像中相应像素的空间位置(x,y)(x, y)(x,y)
- 反向映射:扫描输出像素的位置,并在每一个位置(x,y)(x, y)(x,y)使用(v,w)=T−1(x,y)(v,w) = T^{-1}(x, y)(v,w)=T−1(x,y)计算输入图像的相应位置
- 前向映射是指通过源图像计算得到目标图像的像素点,常用在图像的平移和镜像操作。后向映射是指在目标图像中反着对应源图像。
图像配准
图像变换
线性变换域
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mupNBaMa-1666168115171)(https://cdn.jsdelivr.net/gh/cr7tywzrjw/images/img/202210191141060.png)]
概率方法
出现概率:$p(z_k) = \frac{n_k}{MN} $
平均灰度:
m=∑k=0L−1zkp(zk)m = \sum_{k=0}^{L-1}z_kp(z_k) m=k=0∑L−1zkp(zk)方差的单位是灰度值的平方,在比较对比度值的时候,我们通常替代使用标准差,因为其维数直接取决于灰度值
数字图像处理(冈萨雷斯)_数字图像处理笔记总结相关推荐
- 《数字图像处理 冈萨雷斯》绪论——学习笔记
文章目录 什么是数字图像处理 使用数字图像处理领域的实例 伽马射线成像 X射线成像 紫外波段成像 可见光及红外波段成像 微波波段成像 无线电波段成像 使用其他成像方式的例子 数字图像处理的基本步骤 图 ...
- js 数字递增递减_数字推理满分技巧 !不是干货,请批我!
公众号:兼得公考 数字推理不是广东的特色考点,但广东的数字推理是比较有"特色"的,他的特色就是简单,特别是2019年的数字推理.但我们不能因为某一两年考得简单而简单地学,为了让大家 ...
- 数字货币交易所_数字货币交易所开发运营的盈利模式
数字货币从不看好变成了一年2400亿美金的交易额,数字货币交易所也从 几家变成了500家,而且数量还在不断的增长.那到底数字货币交易所到底有什 么魔力,让众多资本趋之若鹜,数字货币交易所的盈利模式是什 ...
- 东南大学数字信号处理实验_数字与信号处理实验1 离散时间信号分析
实验一 离散时间信号分析 一.实验目的 掌握两个序列的相加.相乘.移位.反褶.卷积等基本运算. 二.实验原理 1.序列的基本概念 离散时间信号在数学上可用时间序列来表示,其中代表序列的第n个数字,n代 ...
- java 数字 下划线_数字文字中的下划线– Java 7功能
java 数字 下划线 One of the Java 7 features is underscores in numeric literals. You can place underscores ...
- 1一9数字行书写法_数字1-9的标准写法-1~9的书写格式
数字 1-9 的标准写法 要求:用田字格本书写,数字 1 - 9 书写时占左边格. 1 :从日字格的右上角附近起笔,画斜线到左下角附近. 2 :起笔碰左线,然后向上向右碰线,略成半圆,斜线到左下角,碰 ...
- vue 数字动画递增_数字滚动动画效果 vue组件化
主要思路是利用css属性writing-mode:vertical-lr:通过设定最大字符长度,补零,去循环,然后添加style translate和transition来完成想要的效果: 子组件根据 ...
- 数字旅游解决方案_数字标牌将助力打造新中国服务经济 吸引更精准受众创造更多机遇...
根据福布斯的预测,截至2019年底,中国的零售市场价值将超过5.6万亿美元:而到2020年,中国将跃身成为全球最大的零售市场.与此同时,在旅游业方面,到2020年,预计每年将有近1.3亿游客到访中国, ...
- arduino数字时钟元件_数字元器件基础
arduino数字时钟元件 In this tutorial we will learn about the basics of Digital computers. We will cover In ...
- java输出数字与字符串_数字与字符串系列教材 (四)- Java 使用printf或format 进行格式化输出...
步骤1:格式化输出 步骤2:printf和format 步骤3:换行符 步骤4:总长度,左对齐,补0,千位分隔符,小数点位数,本地化表达 步骤5:练习-黄鹤 步骤6:答案-黄鹤 步骤 1 : 格式化输 ...
最新文章
- js中document.write的那点事
- 学习 Ruby on Rails 真的很爽!
- SAP用户权限控制大解析及权限进阶分析
- 华为弹性云服务器ECS使用学习0
- 计算机编程嘉兴,嘉兴自学电脑编程一对一
- prim算法详解java_Prim算法(三)之 Java详解
- LDA(latent dirichlet allocation)的应用
- python os.open禁止写入缓存区_Python-设置文件缓冲类型
- 零基础如何入门数据分析师?
- 【JAVA程序设计】(C00003)基于springboot+mybatis的在线购物商城系统
- FairScheduler源码计算fair share
- Java 强制删除文件或目录
- pytorch 预训练模型
- 项目管理知识体系指南(十)项目风险管理
- 怎样获得淘宝/天猫淘口令真实url
- 小米总监说软件测试分为这及类
- IE浏览器如何导入导出收藏夹
- Chainer Chemistry | 用于化学和生物学的深度学习库
- Java后端入行看这 做软件园最靓的仔
- javaweb编程技术第三版教材_Java Web编程技术(第3版)-微课版
热门文章
- opencv与计算机视觉
- JavaScript 习题及面试题 3
- 微信小程序安装moment报错VM182 WAService.js:2 Error: module “pages/mine/myWish/detail/moment.js“ is not define
- 硬改intel网卡MAC地址
- http转socks软件SOCKS2HTTP的使用
- 液压伺服控制系统设计
- 信息论与编码_中大网络信息理论与编码研讨会成功举办 SYSU Workshop on Net. Info. Theory and Coding...
- Packet Tracer 思科模拟器入门教程 之一 初识Packet Tracer
- java常见面试题:Java程序员面试题(四)
- java程序员面试真题及详解2017(纯手动)