浅谈Cache Memory
今天探究的主题是cache。我们围绕几个问题展开。为什么需要cache?如何判断一个数据在cache中是否命中?cache的种类有哪些,区别是什么?
为什么需要cache memory
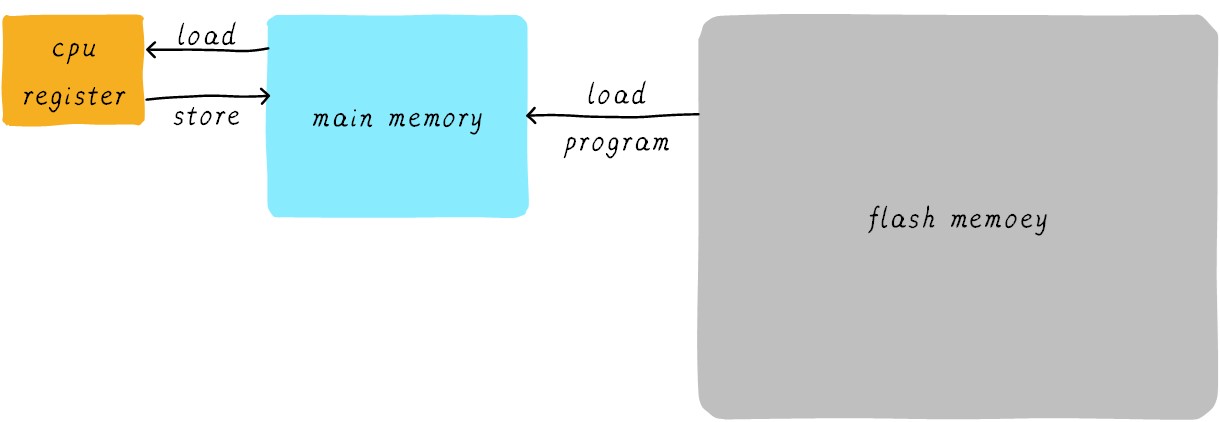
在思考cache是什么之前我们首先先来思考第一个问题:我们的程序是如何运行起来的?我们应该知道程序是运行在 RAM之中,RAM 就是我们常说的DDR(例如 DDR3、DDR4等)。我们称之为main memory(主存)当我们需要运行一个进程的时候,首先会从Flash设备(例如,eMMC、UFS等)中将可执行程序load到main memory中,然后开始执行。在CPU内部存在一堆的通用寄存器(register)。如果CPU需要将一个变量(假设地址是A)加1,一般分为以下3个步骤:
- CPU 从主存中读取地址A的数据到内部通用寄存器 x0(ARM64架构的通用寄存器之一)。
- 通用寄存器 x0 加1。
- CPU 将通用寄存器 x0 的值写入主存。
我们将这个过程可以表示如下:
其实现实中,CPU通用寄存器的速度和主存之间存在着太大的差异。两者之间的速度大致如下关系:
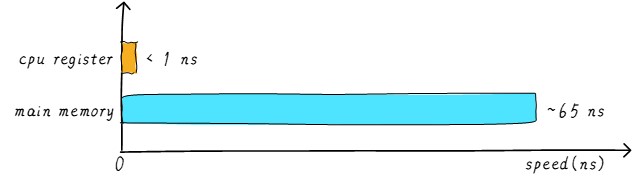
CPU register的速度一般小于1ns,主存的速度一般是65ns左右。速度差异近百倍。因此,上面举例的3个步骤中,步骤1和步骤3实际上速度很慢。当CPU试图从主存中load/store 操作时,由于主存的速度限制,CPU不得不等待这漫长的65ns时间。如果我们可以提升主存的速度,那么系统将会获得很大的性能提升。如今的DDR存储设备,动不动就是几个GB,容量很大。如果我们采用更快材料制作更快速度的主存,并且拥有几乎差不多的容量。其成本将会大幅度上升。我们试图提升主存的速度和容量,又期望其成本很低,这就有点难为人了。因此,我们有一种折中的方法,那就是制作一块速度极快但是容量极小的存储设备。那么其成本也不会太高。这块存储设备我们称之为cache memory。在硬件上,我们将cache放置在CPU和主存之间,作为主存数据的缓存。 当CPU试图从主存中load/store数据的时候, CPU会首先从cache中查找对应地址的数据是否缓存在cache 中。如果其数据缓存在cache中,直接从cache中拿到数据并返回给CPU。当存在cache的时候,以上程序如何运行的例子的流程将会变成如下:
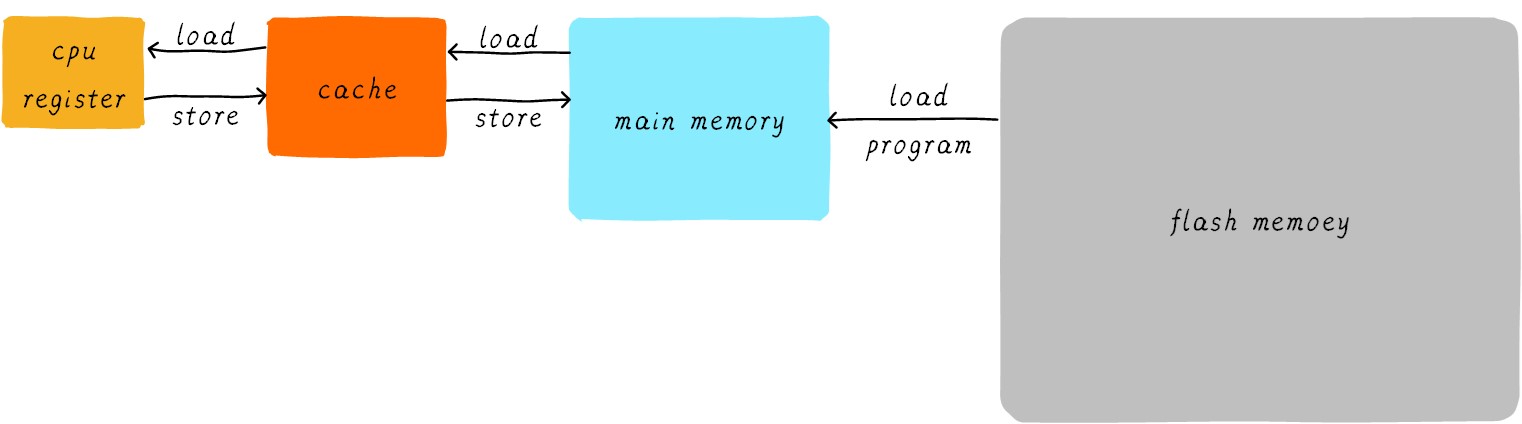
CPU和主存之间直接数据传输的方式转变成CPU和cache之间直接数据传输。cache负责和主存之间数据传输。
多级cache memory
cahe的速度在一定程度上同样影响着系统的性能。一般情况cache的速度可以达到1ns,几乎可以和CPU寄存器速度媲美。但是,这就满足人们对性能的追求了吗?并没有。当cache中没有缓存我们想要的数据的时候,依然需要漫长的等待从主存中load数据。为了进一步提升性能,引入多级cache。前面提到的cache,称之为L1 cache(第一级cache)。我们在L1 cache 后面连接L2 cache,在L2 cache 和主存之间连接L3 cache。等级越高,速度越慢,容量越大。但是速度相比较主存而言,依然很快。不同等级cache速度之间关系如下:
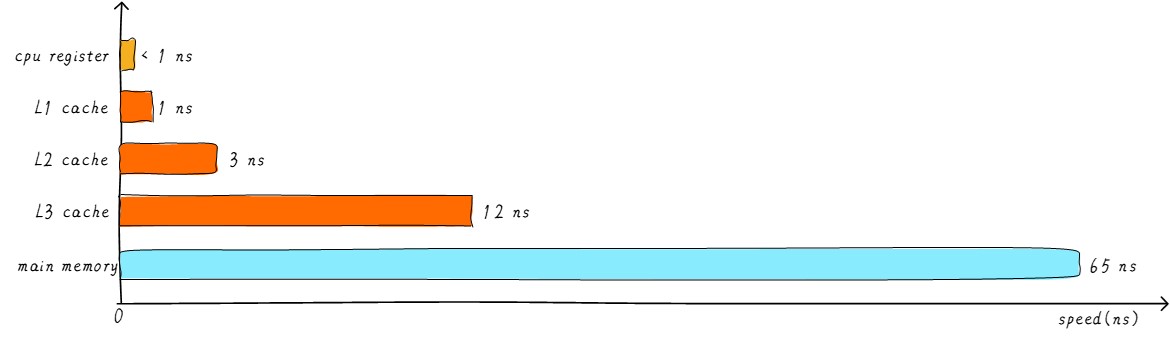
经过3级cache的缓冲,各级cache和主存之间的速度最萌差也逐级减小。在一个真实的系统上,各级cache之间硬件上是如何关联的呢?我们看下Cortex-A53架构上各级cache之间的硬件抽象框图如下:

在Cortex-A53架构上,L1 cache分为单独的instruction cache(ICache)和data cache(DCache)。L1 cache是CPU私有的,每个CPU都有一个L1 cache。一个cluster 内的所有CPU共享一个L2 cache,L2 cache不区分指令和数据,都可以缓存。所有cluster之间共享L3 cache。L3 cache通过总线和主存相连。
多级cache之间的配合工作
首先引入两个名词概念,命中和缺失。 CPU要访问的数据在cache中有缓存,称为“命中” (hit),反之则称为“缺失” (miss)。多级cache之间是如何配合工作的呢?我们假设现在考虑的系统只有两级cache。
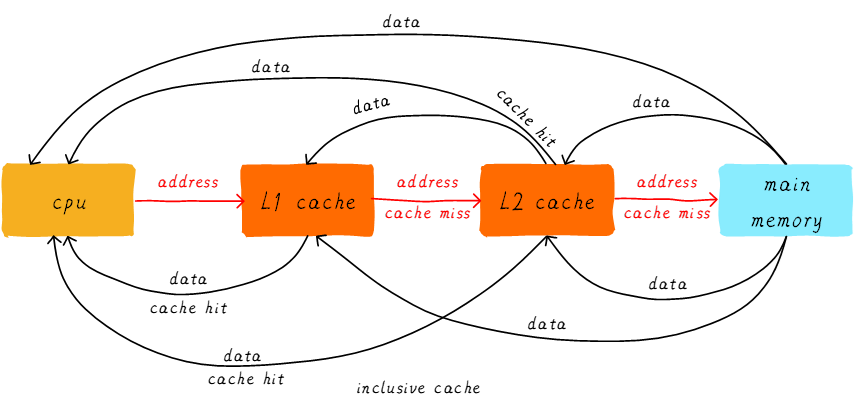
当CPU试图从某地址load数据时,首先从L1 cache中查询是否命中,如果命中则把数据返回给CPU。如果L1 cache缺失,则继续从L2 cache中查找。当L2 cache命中时,数据会返回给L1 cache以及CPU。如果L2 cache也缺失,很不幸,我们需要从主存中load数据,将数据返回给L2 cache、L1 cache及CPU。这种多级cache的工作方式称之为inclusive cache。某一地址的数据可能存在多级缓存中。与inclusive cache对应的是exclusive cache,这种cache保证某一地址的数据缓存只会存在于多级cache其中一级。也就是说,任意地址的数据不可能同时在L1和L2 cache中缓存。
直接映射缓存(Direct mapped cache)
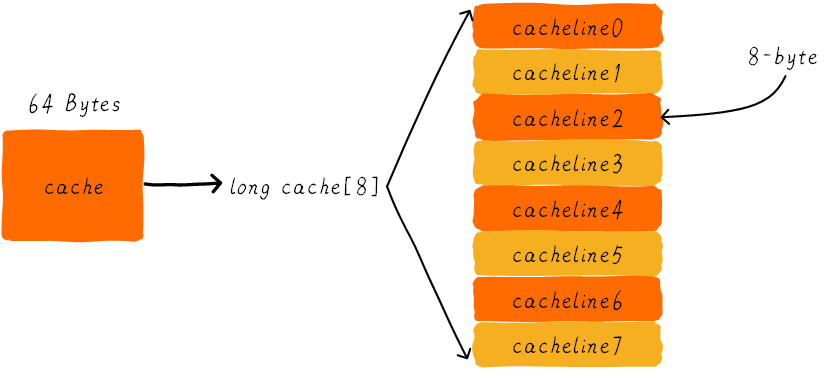
我们继续引入一些cache相关的名词。cache的大小称之为cahe size,代表cache可以缓存最大数据的大小。我们将cache平均分成相等的很多块,每一个块大小称之为cache line,其大小是cache line size。例如一个64 Bytes大小的cache。如果我们将64 Bytes平均分成64块,那么cache line就是1字节,总共64行cache line。如果我们将64 Bytes平均分成8块,那么cache line就是8字节,总共8行cache line。现在的硬件设计中,一般cache line的大小是4-128 Byts。为什么没有1 byte呢?原因我们后面讨论。
这里有一点需要注意,cache line是cache和主存之间数据传输的最小单位。什么意思呢?当CPU试图load一个字节数据的时候,如果cache缺失,那么cache控制器会从主存中一次性的load cache line大小的数据到cache中。例如,cache line大小是8字节。CPU即使读取一个byte,在cache缺失后,cache会从主存中load 8字节填充整个cache line。又是因为什么呢?后面说完就懂了。
我们假设下面的讲解都是针对64 Bytes大小的cache,并且cache line大小是8字节。我们可以类似把这块cache想想成一个数组,数组总共8个元素,每个元素大小是8字节。就像下图这样。
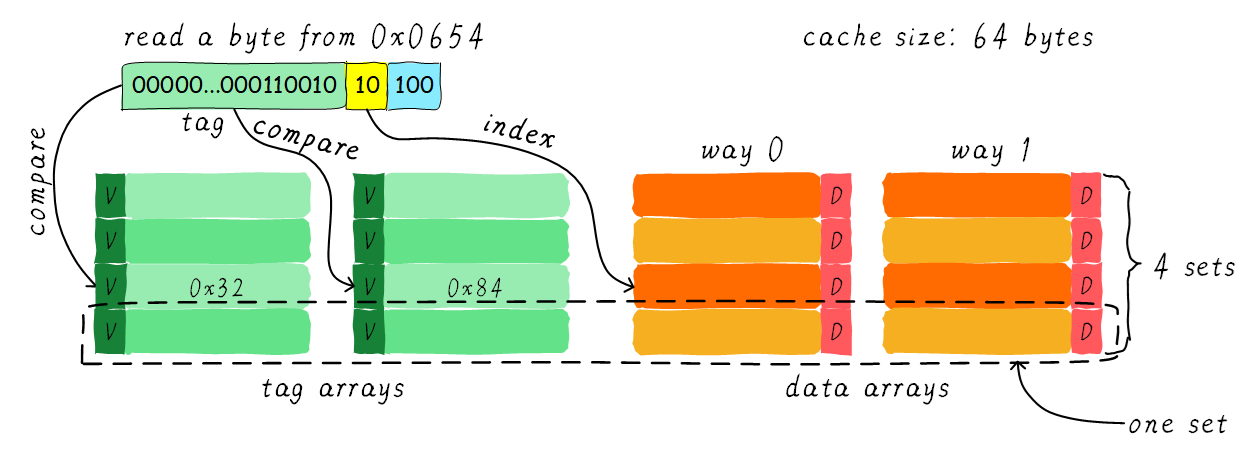
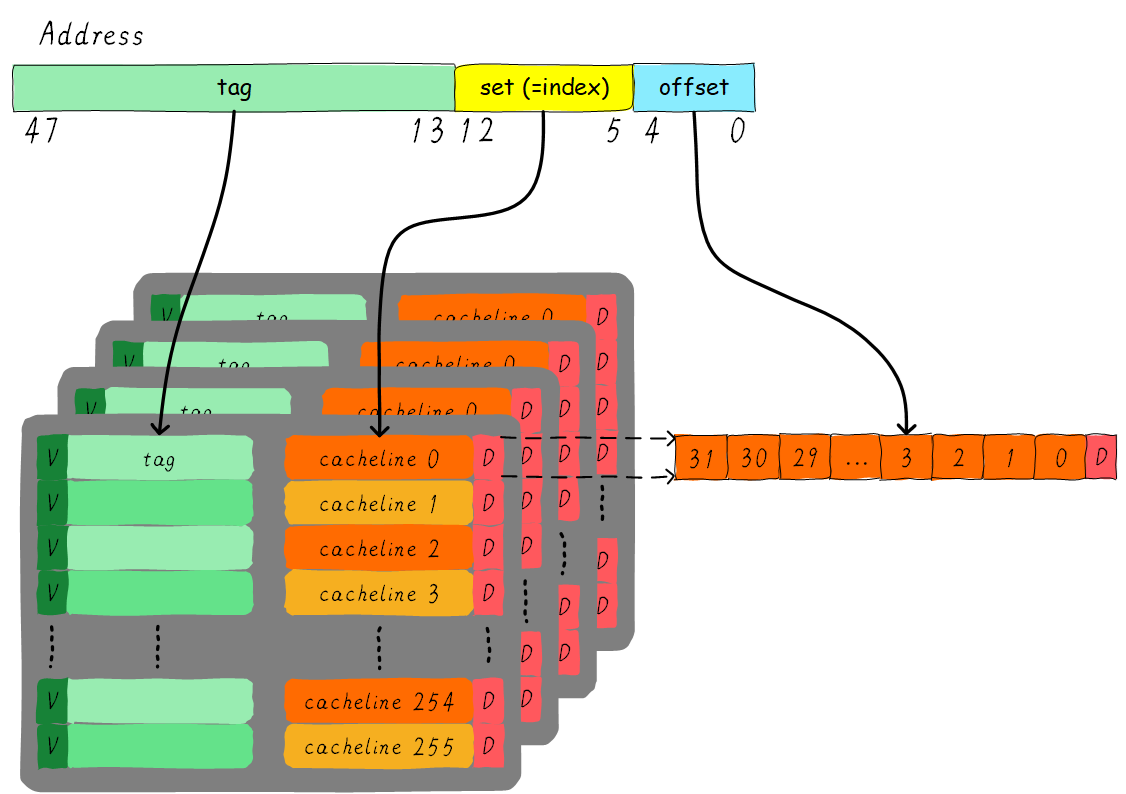
现在我们考虑一个问题,CPU从0x0654地址读取一个字节,cache控制器是如何判断数据是否在cache中命中呢?cache大小相对于主存来说,可谓是小巫见大巫。所以cache肯定是只能缓存主存中极小一部分数据。我们如何根据地址在有限大小的cache中查找数据呢?现在硬件采取的做法是对地址进行散列(可以理解成地址取模操作)。我们接下来看看是如何做到的?
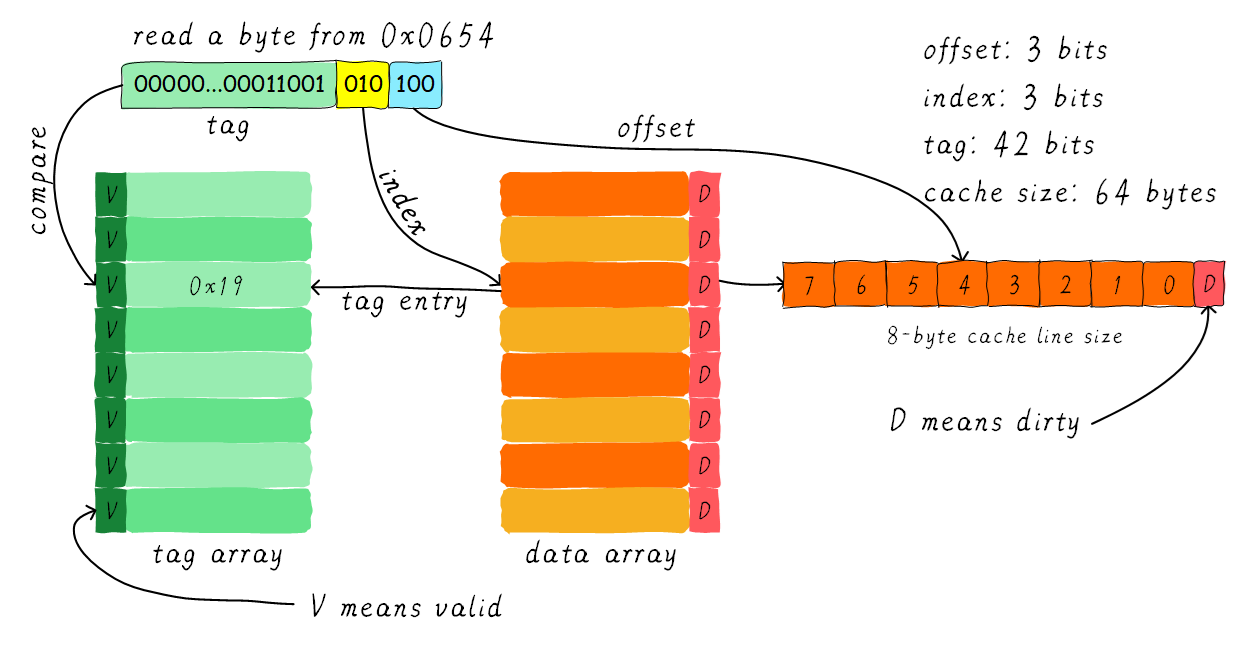
我们一共有8行cache line,cache line大小是8 Bytes。所以我们可以利用地址低3 bits(如上图地址蓝色部分)用来寻址8 bytes中某一字节,我们称这部分bit组合为offset。同理,8行cache line,为了覆盖所有行。我们需要3 bits(如上图地址黄色部分)查找某一行,这部分地址部分称之为index。现在我们知道,如果两个不同的地址,其地址的bit3-bit5如果完全一样的话,那么这两个地址经过硬件散列之后都会找到同一个cache line。所以,当我们找到cache line之后,只代表我们访问的地址对应的数据可能存在这个cache line中,但是也有可能是其他地址对应的数据。所以,我们又引入tag array区域,tag array和data array一一对应。每一个cache line都对应唯一一个tag,tag中保存的是整个地址位宽去除index和offset使用的bit剩余部分(如上图地址绿色部分)。tag、index和offset三者组合就可以唯一确定一个地址了。因此,当我们根据地址中index位找到cache line后,取出当前cache line对应的tag,然后和地址中的tag进行比较,如果相等,这说明cache命中。如果不相等,说明当前cache line存储的是其他地址的数据,这就是cache缺失。在上述图中,我们看到tag的值是0x19,和地址中的tag部分相等,因此在本次访问会命中。由于tag的引入,因此解答了我们之前的一个疑问“为什么硬件cache line不做成一个字节?”。这样会导致硬件成本的上升,因为原本8个字节对应一个tag,现在需要8个tag,占用了很多内存。
我们可以从图中看到tag旁边还有一个valid bit,这个bit用来表示cache line中数据是否有效(例如:1代表有效;0代表无效)。当系统刚启动时,cache中的数据都应该是无效的,因为还没有缓存任何数据。cache控制器可以根据valid bit确认当前cache line数据是否有效。所以,上述比较tag确认cache line是否命中之前还会检查valid bit是否有效。只有在有效的情况下,比较tag才有意义。如果无效,直接判定cache缺失。
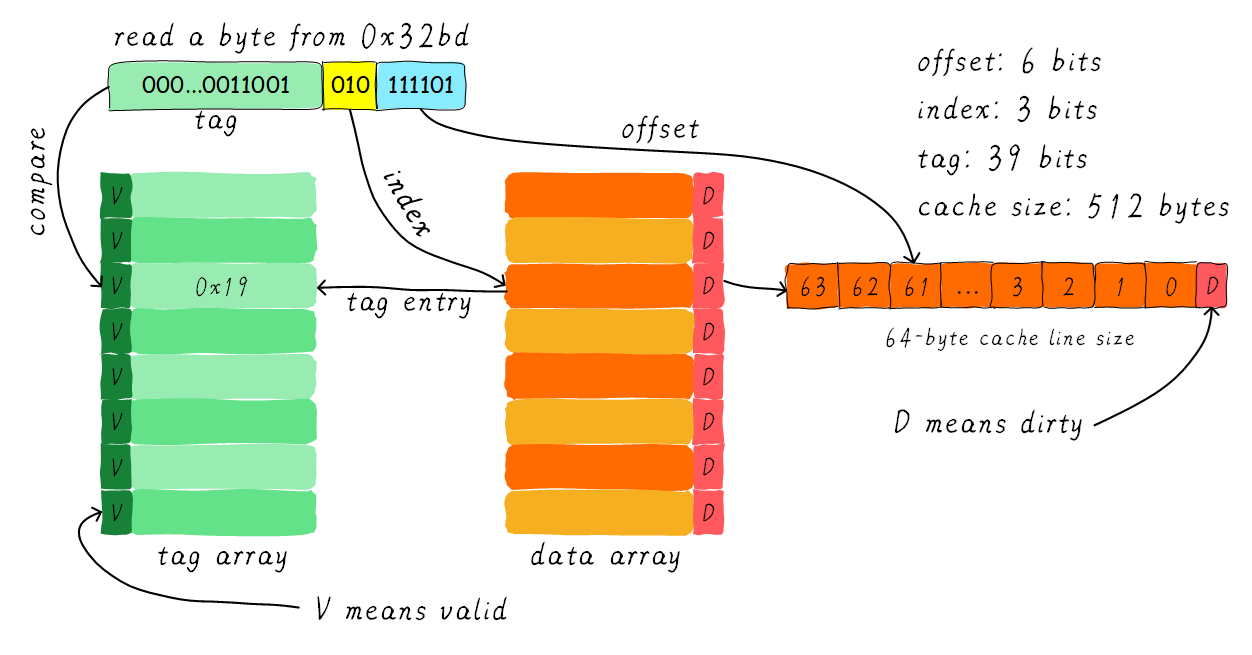
上面的例子中,cache size是64 Bytes并且cache line size是8 bytes。offset、index和tag分别使用3 bits、3 bits和42 bits(假设地址宽度是48 bits)。我们现在再看一个例子:512 Bytes cache size,64 Bytes cache line size。根据之前的地址划分方法,offset、index和tag分别使用6 bits、3 bits和39 bits。如下图所示。
直接映射缓存的优缺点
直接映射缓存在硬件设计上会更加简单,因此成本上也会较低。根据直接映射缓存的工作方式,我们可以画出主存地址0x00-0x88地址对应的cache分布图。
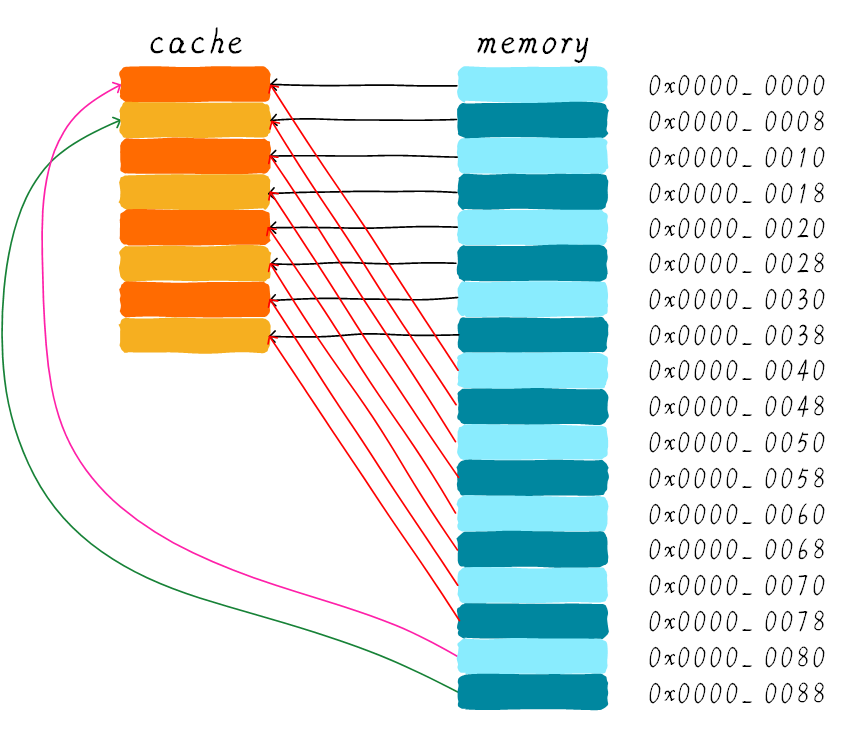
我们可以看到,地址0x00-0x3f地址处对应的数据可以覆盖整个cache。0x40-0x7f地址的数据也同样是覆盖整个cache。我们现在思考一个问题,如果一个程序试图依次访问地址0x00、0x40、0x80,cache中的数据会发生什么呢?首先我们应该明白0x00、0x40、0x80地址中index部分是一样的。因此,这3个地址对应的cache line是同一个。所以,当我们访问0x00地址时,cache会缺失,然后数据会从主存中加载到cache中第0行cache line。当我们访问0x40地址时,依然索引到cache中第0行cache line,由于此时cache line中存储的是地址0x00地址对应的数据,所以此时依然会cache缺失。然后从主存中加载0x40地址数据到第一行cache line中。同理,继续访问0x80地址,依然会cache缺失。这就相当于每次访问数据都要从主存中读取,所以cache的存在并没有对性能有什么提升。访问0x40地址时,就会把0x00地址缓存的数据替换。这种现象叫做cache颠簸(cache thrashing)。针对这个问题,我们引入多路组相连缓存。我们首先研究下最简单的两路组相连缓存的工作原理。
两路组相连缓存(Two-way set associative cache)
我们依然假设64 Bytes cache size,cache line size是8 Bytes。什么是路(way)的概念。我们将cache平均分成多份,每一份就是一路。因此,两路组相连缓存就是将cache平均分成2份,每份32 Bytes。如下图所示。
cache被分成2路,每路包含4行cache line。我们将所有索引一样的cache line组合在一起称之为组。例如,上图中一个组有两个cache line,总共4个组。我们依然假设从地址0x0654地址读取一个字节数据。由于cache line size是8 Bytes,因此offset需要3 bits,这和之前直接映射缓存一样。不一样的地方是index,在两路组相连缓存中,index只需要2 bits,因为一路只有4行cache line。上面的例子根据index找到第2行cache line(从0开始计算),第2行对应2个cache line,分别对应way 0和way 1。因此index也可以称作set index(组索引)。先根据index找到set,然后将组内的所有cache line对应的tag取出来和地址中的tag部分对比,如果其中一个相等就意味着命中。
因此,两路组相连缓存较直接映射缓存最大的差异就是:第一个地址对应的数据可以对应2个cache line,而直接映射缓存一个地址只对应一个cache line。那么这究竟有什么好处呢?
两路组相连缓存优缺点
两路组相连缓存的硬件成本相对于直接映射缓存更高。因为其每次比较tag的时候需要比较多个cache line对应的tag(某些硬件可能还会做并行比较,增加比较速度,这就增加了硬件设计复杂度)。为什么我们还需要两路组相连缓存呢?因为其可以有助于降低cache颠簸可能性。那么是如何降低的呢?根据两路组相连缓存的工作方式,我们可以画出主存地址0x00-0x4f地址对应的cache分布图。
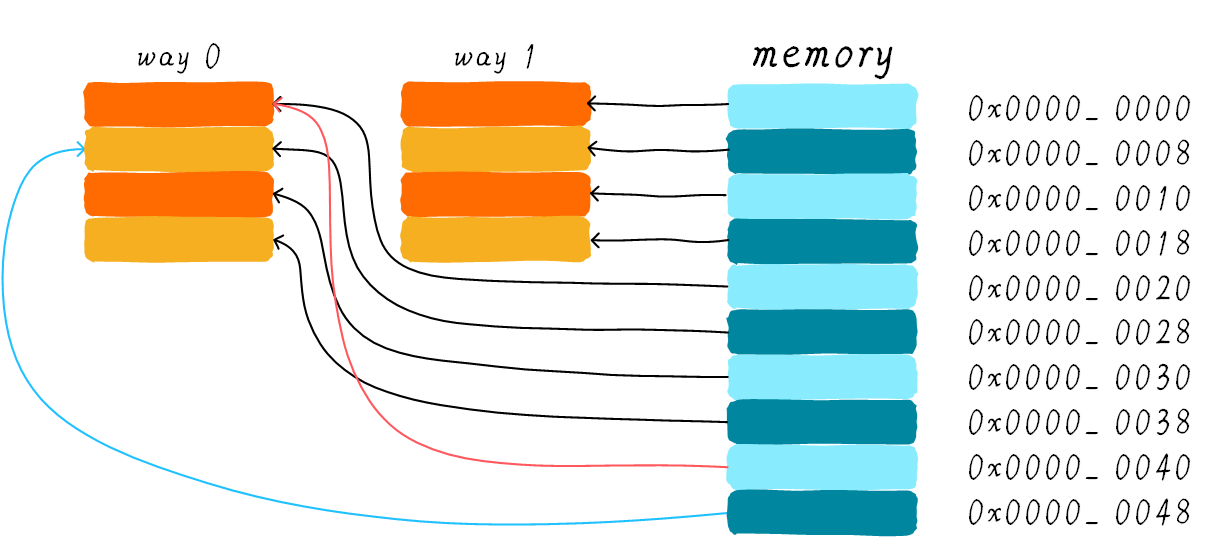
我们依然考虑直接映射缓存一节的问题“如果一个程序试图依次访问地址0x00、0x40、0x80,cache中的数据会发生什么呢?”。现在0x00地址的数据可以被加载到way 1,0x40可以被加载到way 0。这样是不是就在一定程度上避免了直接映射缓存的尴尬境地呢?在两路组相连缓存的情况下,0x00和0x40地址的数据都缓存在cache中。试想一下,如果我们是4路组相连缓存,后面继续访问0x80,也可能被被缓存。
因此,当cache size一定的情况下,组相连缓存对性能的提升最差情况下也和直接映射缓存一样,在大部分情况下组相连缓存效果比直接映射缓存好。同时,其降低了cache颠簸的频率。从某种程度上来说,直接映射缓存是组相连缓存的一种特殊情况,每个组只有一个cache line而已。因此,直接映射缓存也可以称作单路组相连缓存。
全相连缓存(Full associative cache)
既然组相连缓存那么好,如果所有的cache line都在一个组内。岂不是性能更好。是的,这种缓存就是全相连缓存。我们依然以64 Byts大小cache为例说明。
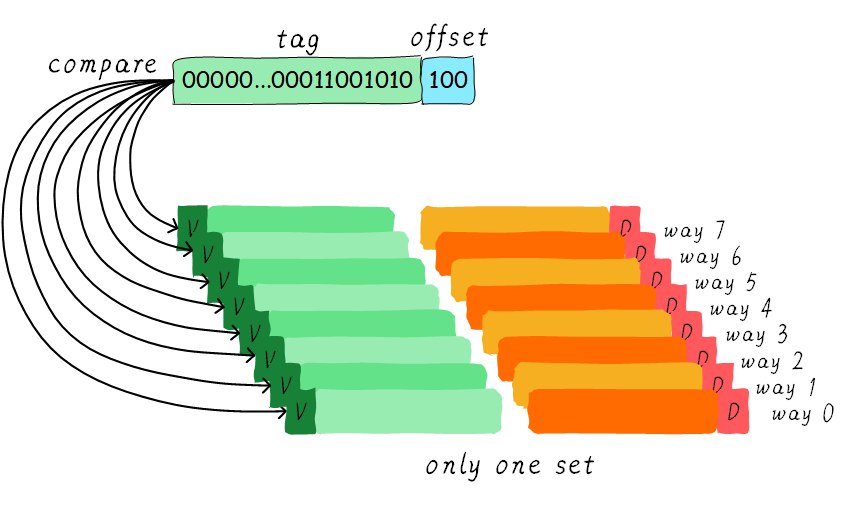
由于所有的cache line都在一个组内,因此地址中不需要set index部分。因为,只有一个组让你选择,间接来说就是你没得选。我们根据地址中的tag部分和所有的cache line对应的tag进行比较(硬件上可能并行比较也可能串行比较)。哪个tag比较相等,就意味着命中某个cache line。因此,在全相连缓存中,任意地址的数据可以缓存在任意的cache line中。所以,这可以最大程度的降低cache颠簸的频率。但是硬件成本上也是更高。
一个四路组相连缓存实例问题
考虑这么一个问题,32 KB大小4路组相连cache,cache line大小是32 Bytes。请思考一下问题:
1). 多少个组? 2). 假设地址宽度是48 bits,index、offset以及tag分别占用几个bit?
总共4路,因此每路大小是8 KB。cache line size是32 Bytes,因此一共有256组(8 KB / 32 Bytes)。由于cache line size是32 Bytes,所以offset需要5位。一共256组,所以index需要8位,剩下的就是tag部分,占用35位。这个cache可以绘制下图表示。
Cache分配策略(Cache allocation policy)
cache的分配策略是指我们什么情况下应该为数据分配cache line。cache分配策略分为读和写两种情况。
读分配(read allocation):
当CPU读数据时,发生cache缺失,这种情况下都会分配一个cache line缓存从主存读取的数据。默认情况下,cache都支持读分配。
写分配(write allocation):
当CPU写数据发生cache缺失时,才会考虑写分配策略。当我们不支持写分配的情况下,写指令只会更新主存数据,然后就结束了。当支持写分配的时候,我们首先从主存中加载数据到cache line中(相当于先做个读分配动作),然后会更新cache line中的数据。
Cache更新策略(Cache update policy)
cache更新策略是指当发生cache命中时,写操作应该如何更新数据。cache更新策略分成两种:写直通和回写。
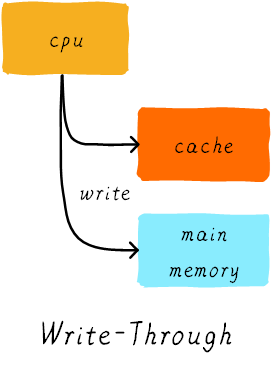
写直通(write through):
当CPU执行store指令并在cache命中时,我们更新cache中的数据并且更新主存中的数据。cache和主存的数据始终保持一致。
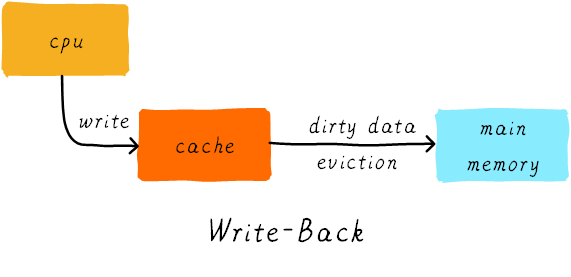
写回(write back):
当CPU执行store指令并在cache命中时,我们只更新cache中的数据。并且每个cache line中会有一个bit位记录数据是否被修改过,称之为dirty bit(翻翻前面的图片,cache line旁边有一个D就是dirty bit)。我们会将dirty bit置位。主存中的数据只会在cache line被替换或者显示clean操作时更新。因此,主存中的数据可能是未修改的数据,而修改的数据躺在cache line中。
同时,为什么cache line大小是cache控制器和主存之间数据传输的最小单位呢?这也是因为每个cache line只有一个dirty bit。这一个dirty bit代表着整个cache line时候被修改的状态。
实例
假设我们有一个64 Bytes大小直接映射缓存,cache line大小是8 Bytes,采用写分配和写回机制。当CPU从地址0x2a读取一个字节,cache中的数据将会如何变化呢?假设当前cache状态如下图所示。
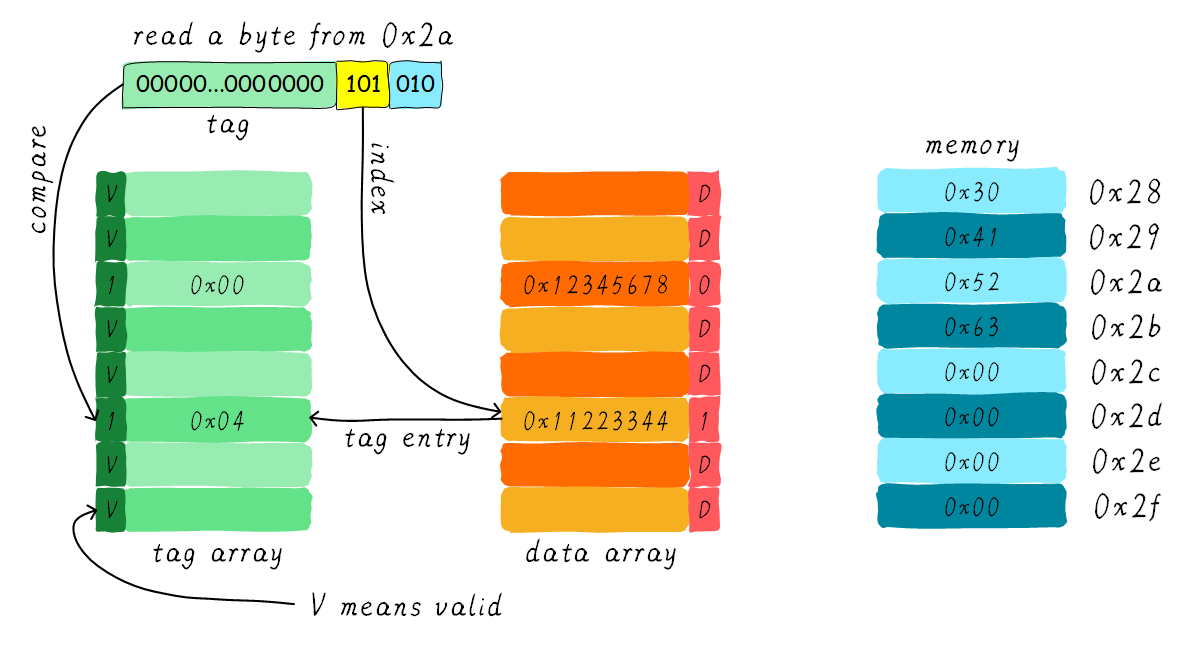
根据index找到对应的cache line,对应的tag部分valid bit是合法的,但是tag的值不相等,因此发生缺失。此时我们需要从地址0x28地址加载8字节数据到该cache line中。但是,我们发现当前cache line的dirty bit置位。因此,cache line里面的数据不能被简单的丢弃,由于采用写回机制,所以我们需要将cache中的数据0x11223344写到地址0x0128地址(这个地址根据tag中的值及所处的cache line行计算得到)。这个过程如下图所示。
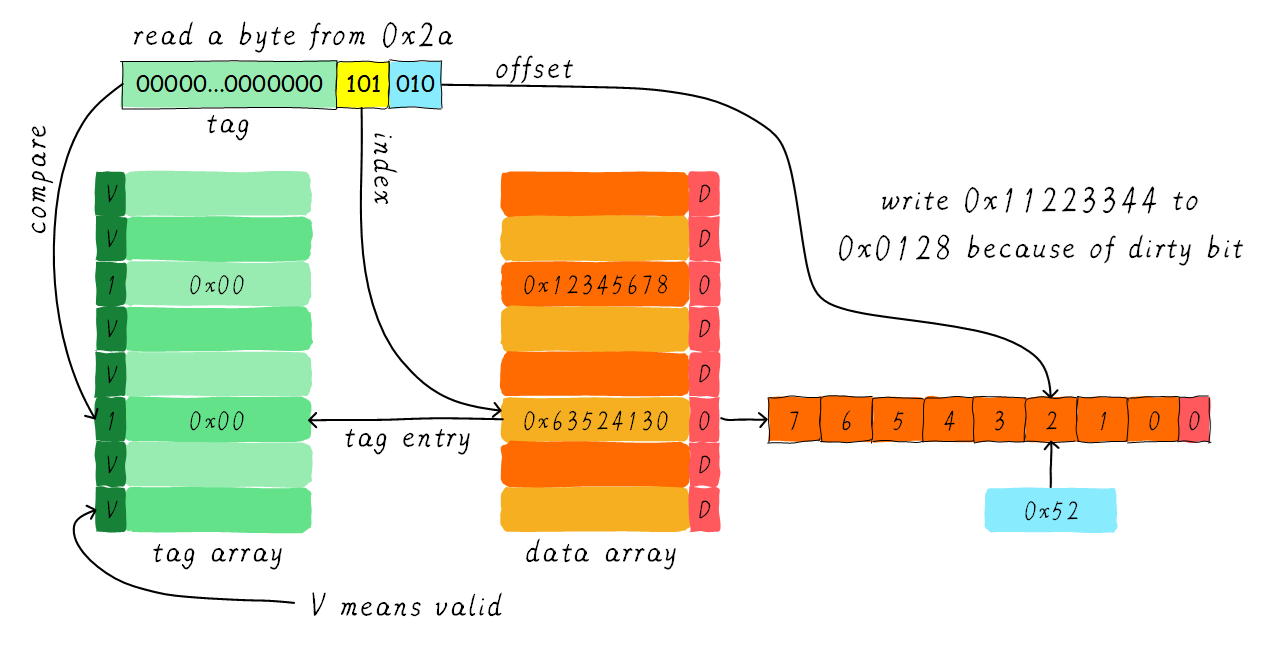
当写回操作完成,我们将主存中0x28地址开始的8个字节加载到该cache line中,并清除dirty bit。然后根据offset找到0x52返回给CPU。
浅谈Cache Memory相关推荐
- 《浅谈Cache Memory》 学习-第一章
序 近些年,我在阅读一些和处理器相关的论文与书籍,有很多些体会,留下了若干文字.其中还是有一片领域,我一直不愿意书写,这片领域是处理器系统中的Cache Memory.我最后决定能够写下一段文字,不仅 ...
- 《浅谈Cache Memory》 学习-第四章
Cache的层次结构 我第一次接触存储器瓶颈这个话题是在上世纪九十年代,距今已接近二十年.至今这个问题非但没有缓和的趋势,却愈演愈烈,进一步发展为Memory Wall.在这些问题没有得到解决之前,片 ...
- 王齐老师 浅谈cache memory
http://blog.sina.com.cn/s/articlelist_1685243084_0_1.html 王老师对cache memory这块讲的非常的深刻,大家值得一看.
- 4路组相连cache设计_浅谈 Cache
1. Cache的历史 在科研领域,C. J. Conti等人于1968年在描述360/85和360/91系统性能差异时最早引入了高速缓存(cache)一词.Alan Jay Smith于1982年的 ...
- 浅谈Cache Memory--目录
序 第1章有关Cache的思考 1.1 Cache不可不察也 1.2 伟大的变革 1.3 让指令飞 1.4 Crime and Punishment 第2章Cache的基础知识 2.1 Cache的工 ...
- 浅谈Memory barrier
文章目录 浅谈Memory barrier 1. 内存乱序 2. 锁机制 3. 内存屏障 4. 参考 浅谈Memory barrier 1. 内存乱序 我们常规思维下,代码的执行是按照我们撰写的顺序来 ...
- mysql 提高电脑配置_Mysql配置优化浅谈
Mysql配置优化浅谈安装MySQL后,配置文件my.cnf在MySQL 安装目录/share/mysql目录中,该目录中还包含多个配置文件可供参考,有my-large.cnf ,my-huge.cn ...
- 中小企业私有云解决方案浅谈
http://tech.watchstor.com/cloud-storage-125882.htm 最近几年,云计算的大潮日渐澎湃,大有席卷全球,颠覆传统IT的趋势.公有云与私有云都受到了大家的关注 ...
- 浅谈SQL Server 对于内存的管理
简介 理解SQL Server对于内存的管理是对于SQL Server问题处理和性能调优的基本,本篇文章讲述SQL Server对于内存管理的内存原理. 二级存储(secondary storage) ...
- 浅谈WebKit之JavaScriptCore/V8
WebKit作为一个浏览器引擎,其中Javascript实现包括JavaScriptCore和V8,为了能更全面的了解WebKit,我们需要深入的了解Javascript实现的基本原理.其在WebKi ...
最新文章
- 干货 | 使用FFT变换自动去除图像中严重的网纹
- android基础ui控件,Android基础——基础UI控件
- SAP WM高阶之Storage Type上架策略L下的Mixed Storage
- linux anaconda环境变量配置
- storm集群和单点安装
- TextureView+MediaPlayer实现在线短视频播放
- Python基础教程(九):面向对象、正则表达式
- 使用 SAP WebIDE 将SAP UI5 应用部署到 SAP ABAP Netweaver 服务器上
- [vue] vue开发过程中你有使用什么辅助工具吗?
- what is apache2 ?
- php moodle mysql_搭建基于Windows + Apache + PHP + MySQL的Moodle平台
- WEB前端之网页设计①----最新最全详解/网页基础结构
- 智慧监狱(所)设计方案
- 移动网络怎么修改服务器地址,移动宽带怎么修改wifi密码?
- excel高级筛选怎么用_Excel高级筛选系列教程(完整版)-第一期基础功能介绍
- 函数发生器与计算机电路,第29讲 信号发生器与变换电路
- VMware软件虚拟机不能全屏
- yolov2 损失函数_深度学习计算机视觉之YOLO,YOLOv2和YOLOv3算法(超详细解析)
- 什么东西能够改善睡眠,拯救失眠的助眠好物推荐
- netty 工控网关_开源软件分享-基于.NET的工控网关和组态软件