Supervised Descent Method(人脸对齐之SDM论文解析)
Supervised Descent Method(人脸对齐之SDM论文解析)
标签: SDM NLS Jacobian Hessian FaceAlignment
作者:贾金让
本人博客链接:http://blog.csdn.net/jiajinrang93
1.概述
文章名称:Supervised Descent Method and its Applications to Face Alignment
文章来源:2013CVPR
文章作者:Xuehan Xiong,Fernando De la Torre
简要介绍:这篇文章主要提出了一种名为SDM(Supervised Descent Method)的方法,用来最小化非线性最小二乘(Non-linear Least Squares)目标函数,即目标函数是均方误差。SDM方法通过学习得到一系列下降的方向和该方向上的尺度,使得目标函数以非常快的速度收敛到最小值,回避了求解Jacobian矩阵和Hessian矩阵的问题。下面开始详细介绍,我补充了文章中只给出结果的推导过程,并且稍微调整了一下文章中牛顿步的推导过程。
2.从牛顿步说起
数值优化在很多领域都有很重要的应用,计算机视觉中很多重要的问题比如(行人跟踪、人脸对齐等)都可以化成非线性优化问题来解决。解决非线性优化的方法有很多,其中非常常用的有基于一阶的或者是二阶的优化方法,比如梯度下降方法、牛顿步、LM算法等等。尽管很多年过去了,在二阶导可求得情况下,牛顿步仍然被认为是一个非常优秀的算法。
那么什么是牛顿步方法呢?下面简单介绍一下牛顿步,后面还会详细推导牛顿步。
牛顿步:在Hessian矩阵正定的情况下,极小值可以通过求解线性方程组来迭代求解。给定一个初始的估计值x0∈ℜp×1x_0\in\Re^{p\times1}x0∈ℜp×1,牛顿步的更新迭代公式如下:
xk+1=xk−H−1(xk)Jf(xk)(1)x_{k+1}=x_k-H^{-1}(x_k)J_f(x_k)\tag{1}xk+1=xk−H−1(xk)Jf(xk)(1)
其中H−1(xk)∈ℜp×pH^{-1}(x_k)\in\Re^{p\times p}H−1(xk)∈ℜp×p是在xkx_kxk点的Hessian矩阵,Jf(xk)∈ℜp×1J_f(x_k)\in\Re^{p\times1}Jf(xk)∈ℜp×1是 在xkx_kxk点的 Jacobian矩阵。
牛顿步方法有两个主要优点:
- 如果牛顿步可以收敛,那么它的收敛速度是二次的,收敛速度非常快。
- 如果初始点在最小点邻域附近,那么它一定可以收敛。
但牛顿法在应用中,也有几个缺点: - Hessian矩阵在极小值附近是局部正定的,但可能不是全局正定的,这就会导致牛顿步并不一定朝向下降的方向。
- 牛顿步需要函数二次可导。这个要求在实际应用中是一个很强的要求,比如图像处理中经常被使用的SIFT特征,它可以被看成是一个不可导的特征,因此在这种情况下,在我们只能通过数值逼近下降的方向或者是Hessian矩阵,但这种计算代价非常大。
- 由于Hessian矩阵通常很大,计算它的逆矩阵代价是非常大的,复杂度通常是O(p3)O(p^3)O(p3)。
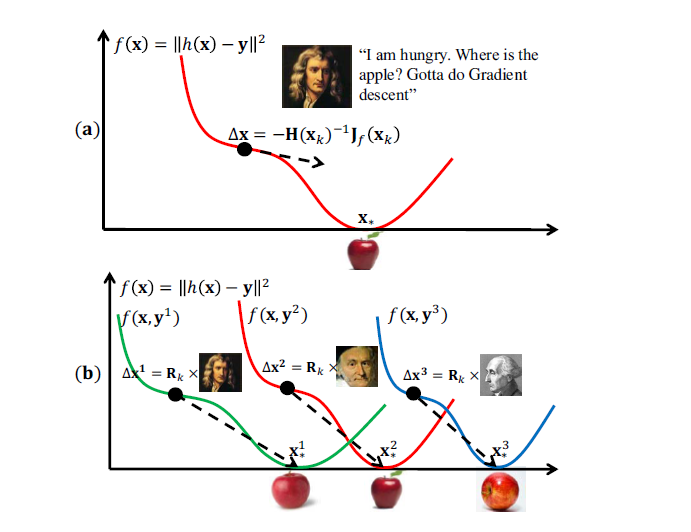
以上三个缺陷使我们在实际应用中,很难计算精确的Hessian矩阵,甚至连数值逼近都是很困难的(由于计算代价比较大)。因此,该文章提出了SDM方法,用数据来学习下降的方向。下面两张图可以用来初步表示牛顿步和SDM两种方法的基本原理。
3.人脸对齐的几个概念(简单介绍)
在介绍SDM之前,还要先简单提一下人脸识别中人脸对齐的基本原理和相关的关键词,因为该SDM方法主要是在人脸对齐方面进行应用。
人脸对齐(Face Alignment)基本原理:
基本概念:人脸识别(face recognizaton)按顺序可以大体上分为四个部分,即人脸检测(face detection),人脸对齐(face alignment),人脸校验(face verification)和人脸识别(face identification)。 人脸检测就是在一张图片中找到人脸所处的位置,即将人脸圈出来,比如拍照时数码相机自动画出人脸。人脸对齐就是在已经检测到的人脸的基础上,自动找到人脸上的眼睛鼻子嘴和脸轮廓等标志性特征位置。人脸校验就是判断两张脸是不是同一个人。人脸识别就是给定一张脸,判断这张脸是谁。
本文研究其中的第二部分,人脸对齐。
人脸对齐中的几个关键词:
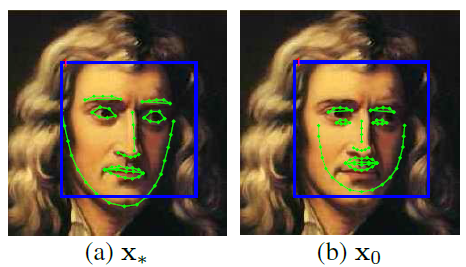
形状(shape):形状就是人脸上的有特征的位置,如下图所示,每张图中所有黄点构成的图形就是该人脸的形状。
特征点(landmark):形状由特征点组成,图中的每一个黄点就是一个特征点。

人脸对齐的最终目的就是在已知的人脸方框(一般由人脸检测确定人脸的位置)上定位其准确地形状。
人脸对齐的算法主要分为两大类:基于优化的方法(Optimization-based method)和基于回归的方法(Regression-based method)。
SDM方法属于基于回归的方法。
基于回归的方法的基本原理:对于一张给定的人脸,给出一个初始的形状,通过不断地迭代,将初始形状回归到接近甚至等于真实形状的位置。
4.Supervised Descent Method
给定一张含有m个像素的图片d∈ℜm×1d\in\Re^{m\times1}d∈ℜm×1,d(x)∈ℜp×1d(x)\in\Re^{p\times1}d(x)∈ℜp×1表示该图片上的p个特征点,h()h()h()表示一个非线性特征提取函数,比如h(d(x))∈ℜ128p×1h(d(x))\in\Re^{128p\times1}h(d(x))∈ℜ128p×1可以表示从p个特征点上提取出的SIFT特征,每个特征点提取出了128个SIFT特征。那么我们的目标就是,在给定一个初始形状x0x_0x0的基础上,通过回归的方法,将x0x_0x0回归到该人脸正确的形状x∗x_*x∗上,用数学的方式表达,即为求得使下面的f(x0+Δx)f(x_0+\Delta x)f(x0+Δx)最小的Δx\Delta xΔx。
f(x0+Δx)=∣∣h(d(x0+Δx))−ϕ∗∣∣22(2)f(x_0+\Delta x)=||h(d(x_0+\Delta x))-\phi_*||_2^2\tag{2}f(x0+Δx)=∣∣h(d(x0+Δx))−ϕ∗∣∣22(2)
其中ϕ∗=h(d(x∗))\phi_*=h(d(x_*))ϕ∗=h(d(x∗))表示该人脸的真实特征点所提取出的SIFT特征,当然,上面说的是在预测时我们的目标,在预测时我们只有初始的x0x_0x0,而Δx\Delta xΔx和ϕ∗\phi_*ϕ∗我们是不知道的。在训练时,我们是知道Δx\Delta xΔx和ϕ∗\phi_*ϕ∗的,我们要在训练时训练得到一个良好的回归器,使它能够让初始的x0x_0x0一步步回归到正确的未知的形状上去。一般来说初始的x0x_0x0就是所有已知样本的真实形状的平均形状。示意图如下图所示。
那么问题来了,如果每一张脸的初始形状都是一样的(即都是已知样本的真实形状的平均形状),那么怎么让它们回归到各自人脸的真实形状呢,答案就是每张图片提取出的不同的SIFT特征(具体采用什么特征可以依据情况而定,论文中 采用了SIFT特征,但也可以采用如HOG,DOG,甚至LBF等特征)了,虽然采用了相同的初始形状,但在不同的图片上,相同的初始形状所提取出的SIFT特征是完全不同的,也就是ϕ0\phi_0ϕ0是不同的,这样就可以通过回归器将其回归到各自的真实形状上了。这一点通过上面的公式也能看出。
现在我们已经有了优化的目标,就是要得到一个回归器,这个回归器能起到的作用是将一个初始形状回归到真实形状上去。也就是学到正确的回归器使其得到最好的Δx\Delta xΔx 。当然想要从初始形状一步步回归到真实形状,只学习一个Δx\Delta xΔx一般是不行的,因为一步就回归到最小点一般来说要求比较高,即使是牛顿步回归的比较快,通常也不能一步就达到目标。所以我们要学习得到多个不同的回归器,它们依次回归下来,能得到一系列的Δx\Delta xΔx,这样我们就能很快根据xk+1=xk+Δxx_{k+1}=x_k+\Delta xxk+1=xk+Δx得到使目标函数最小的点。
下面从牛顿步开始引出SDM。
首先再写一遍目标函数,如下:
f(x0+Δx)=∣∣h(d(x0+Δx))−ϕ∗∣∣22(3)f(x_0+\Delta x)=||h(d(x_0+\Delta x))-\phi_*||_2^2\tag{3}f(x0+Δx)=∣∣h(d(x0+Δx))−ϕ∗∣∣22(3)
我们使用的是从初始特征点周围提取的SIFT特征作为第一次回归的输入,然而SIFT算子是不可导的,所以如果想要使用一阶或者二阶方法来最小化上面的目标函数,那就只能用数值逼近的方法来估计Jacobian和Hessian矩阵(比如有限差分方法等)。然而数值估计计算量非常大,所以我们要采用SDM方法来学习下降的方向和下降的尺度,或者说学习Jaobian和Hessian矩阵。
为了从牛顿步开始引出SDM,我们首先假设h()h()h()这个SIFT特征提取函数是二次可导的。这样才能计算Hessian矩阵。
以下部分推导和论文不同,论文中只给了结论,我补充了论文没有写的推导过程。同时优化了一下牛顿步的推导过程。
第一步,我们首先获得一个初始的形状x0x_0x0,采用的方式是用所有训练样本的真实形状的平均形状给x0x_0x0赋值,也就是说我们迭代的初值为:
KaTeX parse error: \tag works only in display equations
接着就可以根据公式(3)计算f(x0)f(x_0)f(x0),即令Δx=0\Delta x=0Δx=0。
现在我们已经有了f(x0)f(x_0)f(x0),我们想要知道朝什么样的方向改变x0x_0x0并且改变多少x0x_0x0可以得到一个好的f(x1)f(x_1)f(x1),使f(x1)f(x_1)f(x1)尽量接近全局最小值,这里f(x1)f(x_1)f(x1)=f(x0+Δx)f(x_0+\Delta x)f(x0+Δx)。
我们在x0x_0x0点对f(x)f(x)f(x)进行二阶泰勒展开,如下:
f(x)=f(x0)+Jf(x0)T(x−x0)+12(x−x0)TH(x0)(x−x0)+o(∣x−x0∣2)(5)f(x)=f(x_0)+J_f(x_0)^T(x-x_0)+\frac12(x-x_0)^TH(x_0)(x-x_0)+o(|x-x_0|^2)\tag{5}f(x)=f(x0)+Jf(x0)T(x−x0)+21(x−x0)TH(x0)(x−x0)+o(∣x−x0∣2)(5)
等式最右边一项是高阶项,可以忽略。也就是说,我们要优化的目标,就是下面这个二次型,我们要极小化下面的二次型:
f(x)=f(x0)+Jf(x0)T(x−x0)+12(x−x0)TH(x0)(x−x0)(6)f(x)=f(x_0)+J_f(x_0)^T(x-x_0)+\frac12(x-x_0)^TH(x_0)(x-x_0)\tag{6}f(x)=f(x0)+Jf(x0)T(x−x0)+21(x−x0)TH(x0)(x−x0)(6)
因为要极小化f(x)f(x)f(x),所以我们要对xxx进行求导,并且令导数等于0,以此来求出优化的方向和大小,下面对每一项进行求导:
df(x)dx=∇f(x)(7)\frac{d f(x)}{d x}=\nabla f(x)\tag{7}dxdf(x)=∇f(x)(7)
df(x0)dx=0(8)\frac{d f(x_0)}{d x}=0\tag{8}dxdf(x0)=0(8)
dJf(x0)T(x−x0)dx=Jf(x0)(9)\frac{d J_f(x_0)^T(x-x_0)}{d x}=J_f(x_0)\tag{9}dxdJf(x0)T(x−x0)=Jf(x0)(9)
d12(x−x0)TH(x0)(x−x0)dx=12[H(x0)+H(x0)T](x−x0)=H(x0)(x−x0)(10)\frac{d \frac12(x-x_0)^TH(x_0)(x-x_0)}{d x}=\frac12[H(x_0)+H(x_0)^T](x-x_0)=H(x_0)(x-x_0)\tag{10}dxd21(x−x0)TH(x0)(x−x0)=21[H(x0)+H(x0)T](x−x0)=H(x0)(x−x0)(10)
因此,求导后得到:
∇f(x)=0+Jf(x0)+H(x0)(x−x0)(11)\nabla f(x)=0+J_f(x_0)+H(x_0)(x-x_0)\tag{11}∇f(x)=0+Jf(x0)+H(x0)(x−x0)(11)
令导数等于0,得:
∇f(x)=Jf(x0)+H(x0)(x−x0)=0(12)\nabla f(x)=J_f(x_0)+H(x_0)(x-x_0) = 0\tag{12}∇f(x)=Jf(x0)+H(x0)(x−x0)=0(12)
可以解得:
x=x0−H−1(x0)Jf(x0)(13)x=x_0-H^{-1}(x_0)J_f(x_0)\tag{13}x=x0−H−1(x0)Jf(x0)(13)
即
x1=x0−H−1(x0)Jf(x0)(14)x_1=x_0-H^{-1}(x_0)J_f(x_0)\tag{14}x1=x0−H−1(x0)Jf(x0)(14)
这即得到牛顿步的表达式。
我们的第一次迭代的步长用牛顿步的方法求解就是:
Δx1=−H−1(x0)Jf(x0)(15)\Delta x_1=-H^{-1}(x_0)J_f(x_0)\tag{15}Δx1=−H−1(x0)Jf(x0)(15)
如果在目标函数二次可导的情况下,一直使用牛顿步计算出Δx2\Delta x_2Δx2、Δx3\Delta x_3Δx3、…、Δxk\Delta x_kΔxk,那么可以根据更新表达式(如下)一直计算得到新的xxx,直到得到最优解。
xk+1=xk+Δxk(16)x_{k+1}=x_k+\Delta x_k\tag{16}xk+1=xk+Δxk(16)
不过使用牛顿步计算几个Δx\Delta xΔx就要算几次Jacobian和Hessian矩阵,计算量之大可想而知了,况且目标函数还不一定二次可导(之前的二次可导是我们假设的,现在我们将去掉二次可导这个约束条件)。
下面开始推导得到我们要的SDM的方法,是接着上面牛顿步的推导而来的:
首先引入矩阵的链式求导法则如下:
df(g(x))dx=dgT(x)dxdf(g)dg(17)\frac{df(g(x))}{dx}=\frac{dg^T(x)}{dx}\frac{df(g)}{dg}\tag{17}dxdf(g(x))=dxdgT(x)dgdf(g)(17)
应用矩阵的链式求导法则:
Jf(x0)=df(x)dx∣x=x0=d∣∣h(d(x))−ϕ∗∣∣22dx∣x=x0=d(ϕx−ϕ∗)Tdx∣x=x0⋅d∣∣ϕx−ϕ∗∣∣22d(ϕx−ϕ∗)∣x=x0J_f(x_0)=\frac{d f(x)}{d x}|_{x=x_0}=\frac{d||h(d(x))-\phi_*||^2_2}{dx}|_{x=x_0}=\frac{d(\phi_x-\phi_*)^T}{dx}|_{x=x_0}\cdot\frac{d||\phi_x-\phi_*||^2_2}{d(\phi_x-\phi_*)}|_{x=x_0}Jf(x0)=dxdf(x)∣x=x0=dxd∣∣h(d(x))−ϕ∗∣∣22∣x=x0=dxd(ϕx−ϕ∗)T∣x=x0⋅d(ϕx−ϕ∗)d∣∣ϕx−ϕ∗∣∣22∣x=x0
(18)\tag{18}(18)
其中:
d(ϕx−ϕ∗)Tdx∣x=x0=dϕxTdx∣x=x0=dhT(d(x))dx∣x=x0=JhT(x0)(19)\frac{d(\phi_x-\phi_*)^T}{dx}|_{x=x_0}=\frac{d\phi_x^T}{dx}|_{x=x_0}=\frac{dh^T(d(x))}{dx}|_{x=x_0}=J_h^T(x_0)\tag{19}dxd(ϕx−ϕ∗)T∣x=x0=dxdϕxT∣x=x0=dxdhT(d(x))∣x=x0=JhT(x0)(19)
d∣∣ϕx−ϕ∗∣∣22d(ϕx−ϕ∗)∣x=x0=d[(ϕx−ϕ∗)T(ϕx−ϕ∗)]d(ϕx−ϕ∗)∣x=x0=2(ϕx−ϕ∗)∣x=x0=2(ϕ0−ϕ∗)(20)\frac{d||\phi_x-\phi_*||_2^2}{d(\phi_x-\phi_*)}|_{x=x_0}=\frac{d[(\phi_x-\phi_*)^T(\phi_x-\phi_*)]}{d(\phi_x-\phi_*)}|_{x=x_0}=2(\phi_x-\phi_*)|_{x=x_0}=2(\phi_0-\phi_*)\tag{20}d(ϕx−ϕ∗)d∣∣ϕx−ϕ∗∣∣22∣x=x0=d(ϕx−ϕ∗)d[(ϕx−ϕ∗)T(ϕx−ϕ∗)]∣x=x0=2(ϕx−ϕ∗)∣x=x0=2(ϕ0−ϕ∗)(20)
所以:
Jf(x0)=2JhT(x0)(ϕ0−ϕ∗)(21)J_f(x_0)=2J^T_h(x_0)(\phi_0-\phi_*)\tag{21}Jf(x0)=2JhT(x0)(ϕ0−ϕ∗)(21)
因此
x=x0−H−1(x0)Jf(x0)=x0−2H−1(x0)JhT(x0)(ϕ0−ϕ∗)(22)x=x_0-H^{-1}(x_0)J_f(x_0)=x_0-2H^{-1}(x_0)J^T_h(x_0)(\phi_0-\phi_*)\tag{22}x=x0−H−1(x0)Jf(x0)=x0−2H−1(x0)JhT(x0)(ϕ0−ϕ∗)(22)
所以我们的SDM方法的Δx1\Delta x_1Δx1为:
Δx1=−2H−1(x0)JhT(x0)(ϕ0−ϕ∗)(23)\Delta x_1=-2H^{-1}(x_0)J^T_h(x_0)(\phi_0-\phi_*)\tag{23}Δx1=−2H−1(x0)JhT(x0)(ϕ0−ϕ∗)(23)
看起来好像和牛顿步的Δx1=−H−1(x0)Jf(x0)\Delta x_1=-H^{-1}(x_0)J_f(x_0)Δx1=−H−1(x0)Jf(x0)区别不大,然而接下来就会看到区别:
Δx1=−2H−1(x0)JhT(x0)(ϕ0−ϕ∗)=Δx1=−2H−1(x0)JhT(x0)ϕ0+2H−1(x0)JhT(x0)ϕ∗\Delta x_1=-2H^{-1}(x_0)J^T_h(x_0)(\phi_0-\phi_*)=\Delta x_1=-2H^{-1}(x_0)J^T_h(x_0)\phi_0+2H^{-1}(x_0)J^T_h(x_0)\phi_*Δx1=−2H−1(x0)JhT(x0)(ϕ0−ϕ∗)=Δx1=−2H−1(x0)JhT(x0)ϕ0+2H−1(x0)JhT(x0)ϕ∗
(24)\tag{24}(24)
设R0=−2H−1(x0)JhT(x0)R_0=-2H^{-1}(x_0)J^T_h(x_0)R0=−2H−1(x0)JhT(x0),b0=2H−1(x0)JhT(x0)ϕ∗b_0=2H^{-1}(x_0)J^T_h(x_0)\phi_*b0=2H−1(x0)JhT(x0)ϕ∗,可将上式表示成:
Δx1=R0ϕ0+b0(25)\Delta x_1=R_0\phi_0+b_0\tag{25}Δx1=R0ϕ0+b0(25)
也就是说,第一次增量Δx1\Delta x_1Δx1变成了特征ϕ0\phi_0ϕ0的一次函数,而我们只需要知道R0R_0R0和b0b_0b0就可以直接算出第一次的增量Δx1\Delta x_1Δx1!!!
也许有人会问,但是根据你前面的公式,你的R0R_0R0和b0b_0b0也是在计算Jacobian和Hessian矩阵的基础上计算出来的啊,说的没错,但既然现在已经将目标Δx1\Delta x_1Δx1写成了ϕ0\phi_0ϕ0的一次函数,我们计算的R0R_0R0和b0b_0b0难道还要绕回去算Jacobian和Hessian矩阵么,当然不可能了,我们只需要用我们最常用的方法,最小二乘即可!!
即最小化下面这个目标函数:
loss=∣∣Δx1−R0ϕ0−b0∣∣22(26)loss=||\Delta x_1-R_0\phi_0-b_0||_2^2\tag{26}loss=∣∣Δx1−R0ϕ0−b0∣∣22(26)
此时可以由最小二乘的公式直接得到R0R_0R0和b0b_0b0,这里就不写了。
得到了R0R_0R0和b0b_0b0,也就可以依法得到R1R_1R1、b1b_1b1、…、RkR_kRk和bkb_kbk,也就可以算出对应的的Δx2\Delta x_2Δx2、…、Δxk+1\Delta x_{k+1}Δxk+1,这些Δx\Delta xΔx就是我们要的每一次的xxx的变化方向和变化的尺度,也是根据更新公式更新,直到得到最小点的xxx。
有了R1R_1R1、b1b_1b1、…、RkR_kRk和bkb_kbk,在测试样本进行回归的时候,就可以直接进行回归。
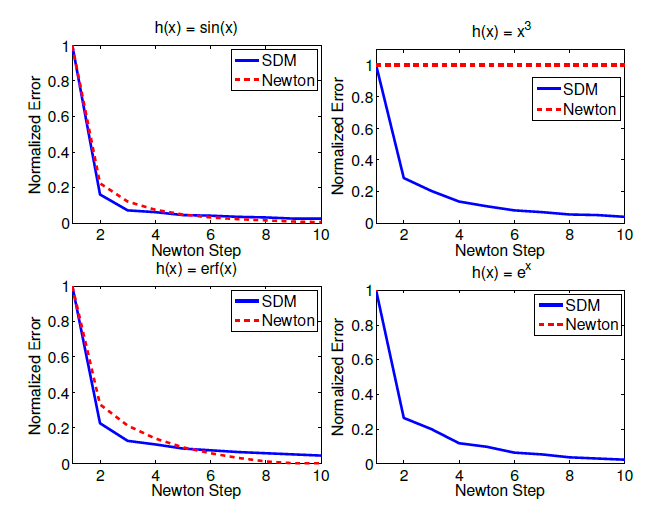
下图是作者做的对比试验(控制的变量是特征提取函数h()h()h()不同):
有图可见,SDM的收敛速度比牛顿步更快,只是收敛得最终结果并没有达到最优(比牛顿步差一点),但SDM更具鲁棒性,在函数的Hessian矩阵不是正定的时候,SDM也能很快收敛。
做个总结:
SDM方法在更新xxx时,就是将更新的增量Δx\Delta xΔx的计算方法进行了改变,由牛顿步的计算Jacobian和Hessian矩阵来得到增量Δx\Delta xΔx,变成了计算RkR_kRk和bkb_kbk来得到增量Δx\Delta xΔx,通过推导将每一次的增量Δx\Delta xΔx变成了该次输入的特征ϕ\phiϕ的一次函数,并通过最小二乘直接计算一次函数的系数RkR_kRk和bkb_kbk,大大减少了计算量。
Supervised Descent Method(人脸对齐之SDM论文解析)相关推荐
- 人脸对齐之SDM论文解析
Supervised Descent Method(人脸对齐之SDM论文解析) 标签: SDM NLS Jacobian Hessian FaceAlignment 作者:贾金让 1.概述 文章名称: ...
- 人脸对齐之SDM / 人脸对齐之LBF / 人脸实时替换
人脸对齐之SDM(Supervised Descent Method) 人脸对齐之LBF(Local Binary Features) 人脸识别技术大总结(1):Face Detection & ...
- Supervised Descent Method and its Applications to Face Alignment
广播说明: 进入深度学习时代,如下的方法已经失去可比性,且我们的代码实现地很粗糙,如果坚持要用,推荐如下代码 https://github.com/wanglin193/SupervisedDesce ...
- 人脸对齐SDM原理----Supervised Descent Method and its Applications to Face Alignment
最近组里研究了SDM算法在人脸对齐中的应用,是CMU的论文<Supervised Descent Method and its Applications to Face Alignment> ...
- 人脸对齐:SDM人脸关键点检测
1 介绍 本文所述方法为SDM在人脸对齐上的应用(Supvised Descent Method).SDM本是一种求函数逼近的方法,可以用于最小二乘求解.SDM并非一种人脸对齐方法,只是作者在提出新的 ...
- SDM(supervised descent method)算法
最近在研究人脸特征点检测,之前没接触过,有些论文虽然能看懂,但是细节的部分可能之前的论文都有提到过,就没有再提.所以找了一篇稍微早一点的文章开始学习起来. MATLAB版本的代码基本上都看懂了,不过作 ...
- SDM(Supervised Descent Method)代码实现在Windows下的配置与使用
每次一把辛酸泪的配置过程都忍不住写成博客想要分享给大家,花了我周末整整一天半什么别的事都没干从早上起床到晚上睡前都在整才搞定,不是为了比惨,而是想着方便后来的朋友们(虽然可能并不会有多少人看到),以及 ...
- 《Supervised Descent Method and its Applications to Face Alignment》阅读笔记
文章目录 摘要 一. 牛顿法 摘要 很多计算机视觉方面的问题(相机校正.图片对齐.运动轨迹结构等)都通过最优化非线性问题得到解决.二阶下降算法是目前公认的最强大.最快速.最可靠地方法.但是二阶下降算法 ...
- 把周杰伦的脸放进漫画——MangaGAN人脸照片生成漫画论文解析
最近北航的同学们新出了一篇文章,把人脸的真实照片转换为<死神>风的漫画,效果如图所示: 论文名:<Unpaired Photo-to-manga Translation Based ...
最新文章
- 豪斯荷尔德变换及变形QR算法对矩阵进行奇异值分解VB算法
- 微软10亿美元投资的OpenAI如何组织员工学习新知识?这里有一份课程与书籍清单...
- Linux之虚拟机里的REHL7的IP
- 地铁译:Spark for python developers --- 搭建Spark虚拟环境 4
- UVA208Firetruck 消防车(图的路径搜索)
- Python 实现简单的爬虫
- python读取多通道信号中的一个通道_RFID多通道读写器的具体应用
- 安卓逆向系列教程 4.9 破解内购 II
- C/C++语言课程设计任务书
- 浅析Mysql的隔离级别及MVCC
- 过期不候--具备生命周期的数据的技术实现方案
- java new对象_Java中new一个对象是一个怎样的过程?JVM中发生了什么?
- 【E-DEEC】基于matlab增强的分布式能源有效集群(E-DEEC)【含Matlab源码 1566期】
- 74CMS4.1.2.4版本黑盒测试
- 8个免费图片素材网,赶紧收藏起来
- CentOS7 安装 YApi
- Shallow Size、Retained Size、Heap Size 和 Allocated
- GoldenDict启动进入后台 Ubuntu
- 听说你还在纠结自己没访问量?成不了“博客专家”?
- python独立样本t检验 图_Graphpad 分析教程 | 手把手教你玩转独立样本 t 检验