什么是SYSTICK:
这是一个24位的系统节拍定时器system tick timer,SysTick,具有自动重载和溢出中断功能,所有基于Cortex_M3处理器的微控制器都可以由这个定时器获得一定的时间间隔。
作用:
在单任务引用程序中,因为其架构就决定了它执行任务的串行性,这就引出一个问题:当某个任务出现问题时,就会牵连到后续的任务,进而导致整个系统崩溃。要解决这个问题,可以使用实时操作系统(RTOS).
因为RTOS以并行的架构处理任务,单一任务的崩溃并不会牵连到整个系统。这样用户出于可靠性的考虑可能就会基于RTOS来设计自己的应用程序。这样SYSTICK存在的意义就是提供必要的时钟节拍,为RTOS的任务调度提供一个有节奏的“心跳”。
微控制器的定时器资源一般比较丰富,比如STM32存在8个定时器,为啥还要再提供一个SYSTICK?原因就是所有基于ARM Cortex_M3内核的控制器都带有SysTick定时器,这样就方便了程序在不同的器件之间的移植。而使用RTOS的第一项工作往往就是将其移植到开发人员的硬件平台上,由于SYSTICK的存在无疑降低了移植的难度。
SysTick定时器除了能服务于操作系统之外,还能用于其它目的:如作为一个闹铃,用于测量时间等。
要注意的是,当处理器在调试期间被喊停(halt)时,则SysTick定时器亦将暂停运作。
时钟的选择:
用户可以在位于Cortex_M3处理器系统控制单元中的系统节拍定时器控制和状态寄存器(SysTick control and status register ,SCSR)选择systick 时钟源。如将SCSR中的CLKSOURCE位置位,SysTick会在CPU频率下运行;而将CLKSOUCE位清除则SysTick会以CPU主频的1/8频率运行。
3.5版本的库函数与以往的有所区别
不存在stm32f10x_systick.c文件,故原来的一些函数也不存在,比如SysTick_SetReload(u32 reload);SysTick_ITConfig(FunctionalState NewState);等
在3.5版本的库函数中与systick相关的函数只有两个
第一个,SysTick_Config(uint32_t ticks),在core_cm3.h头文件中进行定义的。
第二个,void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource),在misc.c文件中定义的。
SysTick_Config(uint32_t ticks),在core_cm3.h
主要的作用:
1、初始化systick
2、打开systick
3、打开systick的中断并设置优先级
4、返回一个0代表成功或1代表失败
注意:
Uint32_t ticks 即为重装值,
这个函数默认使用的时钟源是AHB,即不分频。
要想分频,调用void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource),
但是要注意函数调用的次序,先SysTick_Config(uint32_t ticks),
后SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource)
函数说明:
/**
* @brief Initialize and start the SysTick counter and its interrupt.
*
* @param ticks number of ticks between two interrupts
* @return 1 = failed, 0 = successful
*
* Initialise the system tick timer and its interrupt and start the
* system tick timer / counter in free running mode to generate
* periodical interrupts.
*/
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
if (ticks > SysTick_LOAD_RELOAD_Msk) return (1);
/* Reload value impossible */重装载值必须小于0XFF FFFF,为什么,这是一个24位的递减计数器。
SysTick->LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1;
/* set reload register */设置重装载值,SysTick_LOAD_RELOAD_Msk定义见后面
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
/* set Priority for Cortex-M0 System Interrupts */
SysTick->VAL = 0;
/* Load the SysTick Counter Value */
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
/* Enable SysTick IRQ and SysTick Timer */
return (0);
/* Function successful */
}
#endif
与systick相关的寄存器定义
/** @addtogroup CMSIS_CM3_SysTick CMSIS CM3 SysTick
memory mapped structure for SysTick
@{
*/
typedef struct
{
__IO uint32_t CTRL; /*!< Offset: 0x00 SysTick Control and Status Register */
__IO uint32_t LOAD; /*!< Offset: 0x04 SysTick Reload Value Register */
__IO uint32_t VAL; /*!< Offset: 0x08 SysTick Current Value Register */
__I uint32_t CALIB; /*!< Offset: 0x0C SysTick Calibration Register */
} SysTick_Type;
与systick寄存器相关的寄存器及位的定义
/* SysTick Control / Status Register Definitions */控制/状态寄存器
#define SysTick_CTRL_COUNTFLAG_Pos 16 /*!< SysTick CTRL: COUNTFLAG Position */
#define SysTick_CTRL_COUNTFLAG_Msk (1ul << SysTick_CTRL_COUNTFLAG_Pos)
/*!< SysTick CTRL: COUNTFLAG Mask */ 溢出标志位
#define SysTick_CTRL_CLKSOURCE_Pos 2 /*!< SysTick CTRL: CLKSOURCE Position */
#define SysTick_CTRL_CLKSOURCE_Msk (1ul << SysTick_CTRL_CLKSOURCE_Pos)
/*!< SysTick CTRL: CLKSOURCE Mask */时钟源选择位,0=外部时钟;1=内核时钟
#define SysTick_CTRL_TICKINT_Pos 1 /*!< SysTick CTRL: TICKINT Position */
#define SysTick_CTRL_TICKINT_Msk (1ul << SysTick_CTRL_TICKINT_Pos)
/*!< SysTick CTRL: TICKINT Mask */异常请求位
#define SysTick_CTRL_ENABLE_Pos 0 /*!< SysTick CTRL: ENABLE Position */
#define SysTick_CTRL_ENABLE_Msk (1ul << SysTick_CTRL_ENABLE_Pos)
/*!< SysTick CTRL: ENABLE Mask */使能位
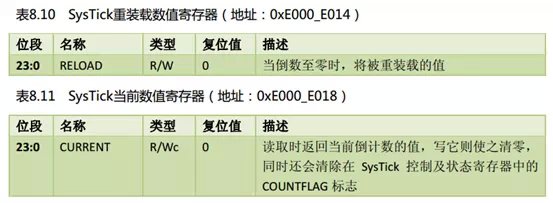
/* SysTick Reload Register Definitions */
#define SysTick_LOAD_RELOAD_Pos 0 /*!< SysTick LOAD: RELOAD Position */
#define SysTick_LOAD_RELOAD_Msk (0xFFFFFFul << SysTick_LOAD_RELOAD_Pos)
/*!< SysTick LOAD: RELOAD Mask */
/* SysTick Current Register Definitions */
#define SysTick_VAL_CURRENT_Pos 0 /*!< SysTick VAL: CURRENT Position */
#define SysTick_VAL_CURRENT_Msk (0xFFFFFFul << SysTick_VAL_CURRENT_Pos)
/*!< SysTick VAL: CURRENT Mask */
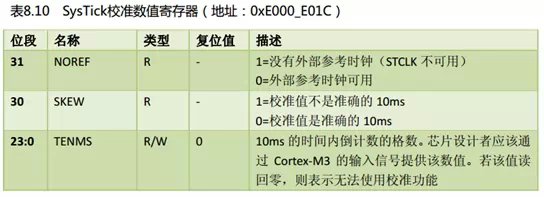
/* SysTick Calibration Register Definitions */
#define SysTick_CALIB_NOREF_Pos 31 /*!< SysTick CALIB: NOREF Position */
#define SysTick_CALIB_NOREF_Msk (1ul << SysTick_CALIB_NOREF_Pos)
/*!< SysTick CALIB: NOREF Mask */
#define SysTick_CALIB_SKEW_Pos 30 /*!< SysTick CALIB: SKEW Position */
#define SysTick_CALIB_SKEW_Msk (1ul << SysTick_CALIB_SKEW_Pos)
/*!< SysTick CALIB: SKEW Mask */
#define SysTick_CALIB_TENMS_Pos 0 /*!< SysTick CALIB: TENMS Position */
#define SysTick_CALIB_TENMS_Msk (0xFFFFFFul << SysTick_VAL_CURRENT_Pos) /*!< SysTick CALIB: TENMS Mask */
/*@}*/ /* end of group CMSIS_CM3_SysTick */
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource)
作用:
选择systick的时钟源,AHB时钟或AHB的8分频
默认使用的是AHB时钟,即72MHz
函数说明:
/**
* @brief Configures the SysTick clock source.
* @param SysTick_CLKSource: specifies the SysTick clock source.
* This parameter can be one of the following values:
* @arg SysTick_CLKSource_HCLK_Div8: AHB clock divided by 8 selected as SysTick clock source.
* @arg SysTick_CLKSource_HCLK: AHB clock selected as SysTick clock source.
* @retval None
*/
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource)
{
/* Check the parameters */
assert_param(IS_SYSTICK_CLK_SOURCE(SysTick_CLKSource));
if (SysTick_CLKSource == SysTick_CLKSource_HCLK)
{
SysTick->CTRL |= SysTick_CLKSource_HCLK;
}
else
{
SysTick->CTRL &= SysTick_CLKSource_HCLK_Div8;
}
}
Systick时钟源的定义:
/** @defgroup SysTick_clock_source
* @{
*/
#define SysTick_CLKSource_HCLK_Div8 ((uint32_t)0xFFFFFFFB)//将控制状态寄存器的第二位置0,即用外部时钟源
#define SysTick_CLKSource_HCLK ((uint32_t)0x00000004)//将控制状态寄存器的第二位置1,即用内核时钟
#define IS_SYSTICK_CLK_SOURCE(SOURCE) (((SOURCE) == SysTick_CLKSource_HCLK) || \
((SOURCE) == SysTick_CLKSource_HCLK_Div8))
Systick定时时间的设定:
重装载值=systick 时钟频率(Hz)X想要的定时时间(S)
如:时钟频率为:AHB的8分频;AHB=72MHz那么systick的时钟频率为72/8MHz=9MHz;要定时1秒,则
重装载值=9000000X1=9000000;
定时10毫秒
重状态值=9000000X0.01=90000
Systick的中断处理函数,
在startup_stm32f10x_hd.s启动文件中有定义。
DCD SysTick_Handler ; SysTick Handler
根据需要直接编写中断处理函数即可:
Void SysTick_Handler (void)
{ ;}
注意:
如果在工程中,加入了stm32f10x_it.c,而又在主函数中编写中断函数,则会报错。
因为在stm32f10x_it.c文件中,也有这个中断函数的声明,只是内容是空的。
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
}
中断优先级的修改
在调用SysTick_Config(uint32_t ticks)之后,调用 void NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority)。这个函数在core_cm3.h头文件中。
具体内容如下:
/**
* @brief Set the priority for an interrupt
*
* @param IRQn The number of the interrupt for set priority
* @param priority The priority to set
*
* Set the priority for the specified interrupt. The interrupt
* number can be positive to specify an external (device specific)
* interrupt, or negative to specify an internal (core) interrupt.
*
* Note: The priority cannot be set for every core interrupt.
*/
static __INLINE void NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority)
{
if(IRQn < 0) {
SCB->SHP[((uint32_t)(IRQn) & 0xF)-4] = ((priority << (8 - __NVIC_PRIO_BITS)) & 0xff); } /* set Priority for Cortex-M3 System Interrupts */
else {
NVIC->IP[(uint32_t)(IRQn)] = ((priority << (8 - __NVIC_PRIO_BITS)) & 0xff); } /* set Priority for device specific Interrupts */
}
下面以一个实例来说明:
利用systick来实现以1秒的时间间隔,闪亮一个LED指示灯,指示灯接在GPIOA.8,低电平点亮。
#include "stm32f10x.h"
//函数声明
void GPIO_Configuration(void);//设置GPIOA.8端口
u32 t;//定义一个全局变量
int main(void)
{
// SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
SysTick_Config(9000000);
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
GPIO_Configuration();
while(1);
}
//GPIOA.8设置函数
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStruct;//定义一个端口初始化结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//打开GPIOA口时钟
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;//设置为推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;//设置输出频率50M
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8;//指定第8脚
GPIO_Init(GPIOA,&GPIO_InitStruct);//初始化GPIOA.8
GPIO_SetBits( GPIOA, GPIO_Pin_8);//置高GPIOA.8,关闭LED
}
//systick中断函数
void SysTick_Handler(void)
{
t++;
if(t>=1)
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)==1)
{GPIO_ResetBits( GPIOA, GPIO_Pin_8);}
}
if(t>=2)
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)==0)
{GPIO_SetBits( GPIOA, GPIO_Pin_8);}
t=0;
}
}
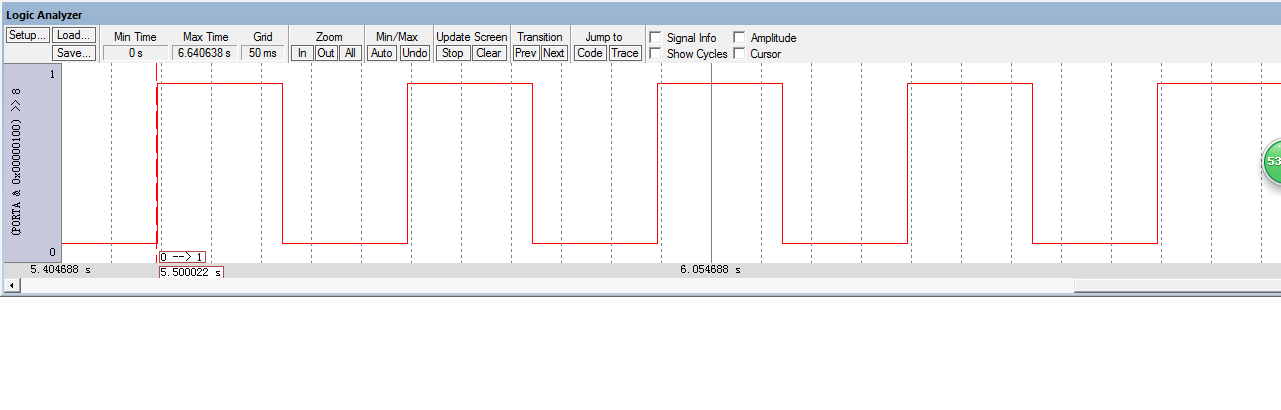
模拟后的结果
1、8分频后结果
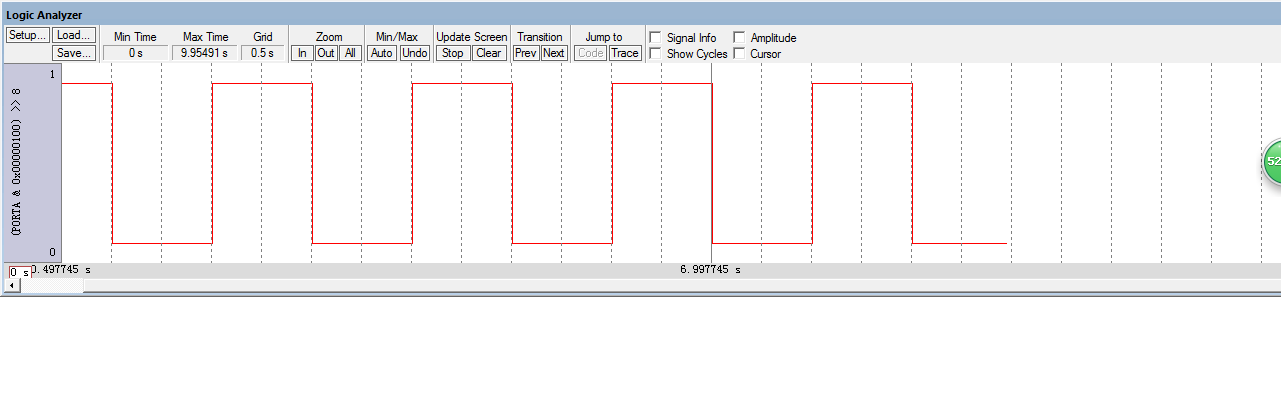
2、直接调用SysTick_Config(9000000);即不分频的结果,间隔为1/8=0.125s
总结:
1、要使用systick定时器,只需调用SysTick_Config(uint32_t ticks)函数即可,
自动完成了,重装载值的装载,时钟源选择,计数寄存器复位,中断优先级的设置(最低),开中断,开始计数的工作。
2、要修改时钟源调用SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource)。
3、要修改中断优先级调用
void NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority)
应用说明:
1、因systick是一个24位的定时器,故重装值最大值为2的24次方=16 777 215,
要注意不要超出这个值。
2、systick是cortex_m3的标配,不是外设。故不需要在RCC寄存器组打开他的时钟。
3、每次systick溢出后会置位计数标志位和中断标志位,计数标志位在计数器重装载后被清除,而中断标志位也会随着中断服务程序的响应被清除,所以这两个标志位都不需要手动清除。
4、采用使用库函数的方法,只能采用中断的方法响应定时器计时时间到,如要采用查询的方法,那只能采用设置systick的寄存器的方法,具体操作以后再做分析。
http://www.51hei.com/bbs/dpj-31803-1.html
STM32的SYSTICK详解相关推荐
- STM32的定时器详解(嵌入式学习)
STM32的定时器详解 0. 前言 1. Systick定时器 概念 工作原理 时钟基准 Systick练习 2. HAL_Delay函数分析 3. 定时器 基本概念 定时器分类 定时器组成 计数器 ...
- STM32 HAL库详解 及 手动移植
源: STM32 HAL库详解 及 手动移植
- stm32 DMA使用详解
转自:http://www.cnblogs.com/121792730applllo/p/3154447.html STM32 DMA使用详解 DMA部分我用到的相对简单,当然,可能这是新东西,我暂时 ...
- STM32启动文件详解-比较清晰的一篇
STM32启动文件详解 启动文件使用的 ARM 汇编指令汇总 启动程序源码注释(点此下载) 1. Stack-栈 Stack_Size EQU 0x00000400AREA STACK, NOINIT ...
- STM32 CAN通信协议详解—小白入门(二)
文章目录 (一)CAN通信协议简介 (二)CAN物理层 2.1.闭环总线网络2.2.开环总线网络2.3.通信节点2.4.差分信号2.5.CAN协议的差分信号 (三)协议层 3.1.CAN的波特率及位同 ...
- STM32串口通信详解以及通信异常或者卡死常见问题分析
STM32串口通信详解以及通信异常或者卡死常见问题分析 目录 STM32串口通信详解以及通信异常或者卡死常见问题分析 一.常见的异常问题 二.STM32的串口简介 1.串口的通讯方式 ①按数据传输方向 ...
- STM32最小系统详解
STM32最小系统详解 1. 电源电路 2. 晶振电路 3. 复位电路 4. 下载电路(串口下载) 本文章将以普中的STM32F103系列的开发板为载体,任何一款STM32开发板都是在其最小系统基础上 ...
- STM32 HAL库详解
STM32 HAL库整体总结 STM32 之二 HAL库详解 及 手动移植 本篇博客是对以上参考资源的一个二次总结与整理. 1. HAL库文件结构 对于开发人员而言,首先要清楚 HAL 库的文件结构. ...
- 【stm32】delay详解
1 首先看函数: 1.1 当使用ucos时才有以下部分: 主要实现宏定义与基本函数定义. #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS定义了,说明要支持OS了 ...
最新文章
- linux下安装redmine1.2.1全记录
- [LeetCode]: 53: Maximum Subarray
- 领域驱动第四章-读书笔记
- UVa OJ 120
- 解决wiremock中velocity脚本(.vm)中文编码乱码问题
- map/set/multi_map/multi_set/unorder_map/unorder_set总结
- 基于MATLAB的摩尔斯电码系统设计
- php redis 集合返回多条,详解PHP多个进程配合redis的有序集合实现大文件去重
- 用css实现三角效果
- 【转】ABP源码分析二十:ApplicationService
- linux时间与日期函数,Linux时间日期函数
- Android应用程序组件间通信(二)——IntentFilter类简介
- 电脑自带的服务器修复,还原或修复运行 Windows Server Essentials 的服务器
- 一个共享XP、2003上文件与打印机简单易行的方法
- Matlab有趣代码
- excel两个表格数据对比_表格技巧—Excel中如何查找相同的数据
- Unicode编码详解(一):Unicode简介及其分类
- Docker - Dockerfile之FROM、ARG、LABEL、MAINTAINER、RUN、CMD指令详解
- c语言杖举,形近字组词。直()植()杖()仗()提()题()漫()慢()
- 汇编指令 int 21 h 调用
热门文章
- c语言单片机用float,float类型变量在单片机中的存储
- 通过一个大型项目来学习分布式算法(1)
- Masters of Doom
- 解决任务管理器被禁用
- Dos命令关机、重启
- # PES packet format
- 地图坐标类型及相互转换
- 物理层故障诊断与排除(2.0)
- 2021湖南多校对抗赛第一场
- Python 代码编程问题总结