深度学习入门---PCA,白化
引言
主成分分析(PCA)是一种能够极大提升无监督特征学习速度的数据降维算法。更重要的是,理解PCA算法,对实现白化算法有很大的帮助,很多算法都先用白化算法作预处理步骤。
假设你使用图像来训练算法,因为图像中相邻的像素高度相关,输入数据是有一定冗余的。具体来说,假如我们正在训练的16x16灰度值图像,记为一个256维向量 x∈R256 \textstyle x \in \Re^{256} ,其中特征值 xj \textstyle x_j 对应每个像素的亮度值。由于相邻像素间的相关性,PCA算法可以将输入向量转换为一个维数低很多的近似向量,而且误差非常小。
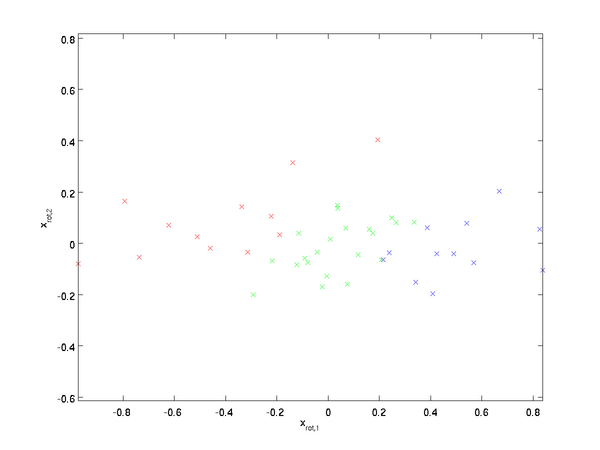
假设我们拥有数据 {x(1),x(2),…,x(m)} \textstyle \{x^{(1)}, x^{(2)}, \ldots, x^{(m)}\} ,维度 n=2 \textstyle n=2,即 x(i)∈R2 \textstyle x^{(i)} \in \Re^2 。假设我们想把数据从2维降到1维。(在实际应用中,我们也许需要把数据从256维降到50维;在这里使用低维数据,主要是为了更好地可视化算法的行为)。下图是我们的数据集:
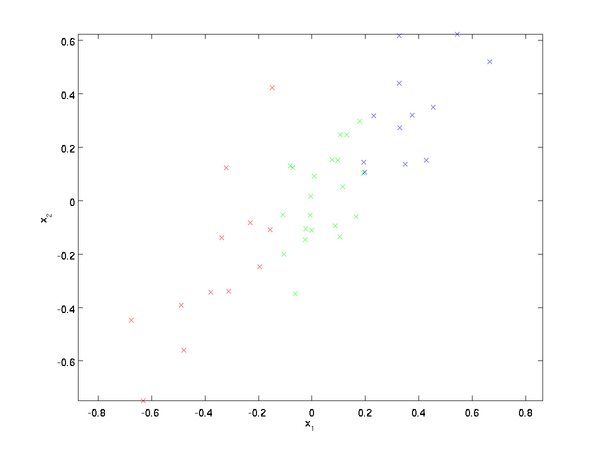
这些数据已经进行了预处理,使得每个特征 x1 \textstyle x_1 和 x2 \textstyle x_2 具有相同的均值(零)和方差。
为方便展示,根据 x1 \textstyle x_1 值的大小,我们将每个点分别涂上了三种颜色之一,但该颜色并不用于算法而仅用于图解。
PCA算法将寻找一个低维空间来投影我们的数据。从下图中可以看出, u1 \textstyle u_1 是数据变化的主方向,而 u2 \textstyle u_2 是次方向
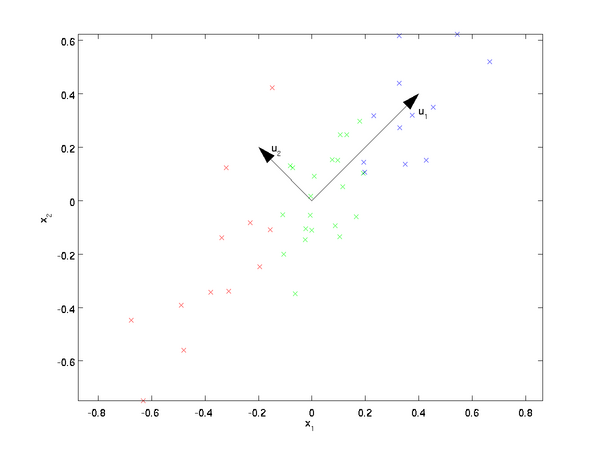
也就是说,数据在 u1 \textstyle u_1 方向上的变化要比在 u2 \textstyle u_2 方向上大。为更形式化地找出方向 u1 \textstyle u_1 和 u2 \textstyle u_2 ,我们首先计算出矩阵 Σ \textstyle \Sigma ,如下所示:
实际上在代码实现时,上面的 x(i) x^{(i)}对应是全部数据集,样本按列摆放。
假设 x \textstyle x 的均值为零,那么 Σ \textstyle \Sigma 就是x的协方差矩阵。(符号 Σ \textstyle \Sigma ,读”Sigma”,是协方差矩阵的标准符号。虽然看起来与求和符号 ∑ni=1i \sum_{i=1}^n i 比较像,但它们其实是两个不同的概念。)
可以证明,数据变化的主方向 u1 \textstyle u_1 就是协方差矩阵 Σ \textstyle \Sigma 的主特征向量,而 u2 \textstyle u_2 是次特征向量。
求得协方差矩阵后,我们需要求出其对应的特征向量组成的矩阵U,按列摆放。
此处, u1 \textstyle u_1 是主特征向量(对应最大的特征值), u2 \textstyle u_2 是次特征向量。以此类推,另记 λ1,λ2,…,λn \textstyle \lambda_1, \lambda_2, \ldots, \lambda_n 为相应的特征值。
在本例中,向量 u1和u2 \textstyle u_1 和 \textstyle u_2 构成了一个新基,可以用来表示数据。令 x∈R2 \textstyle x \in \Re^2 为训练样本,那么 uT1x \textstyle u_1^Tx 就是样本点 x \textstyle x 在维度 u1 \textstyle u_1 上的投影的长度(幅值)。同样的, uT2x \textstyle u_2^Tx 是 x \textstyle x 投影到 u2 \textstyle u_2 维度上的幅值。
旋转数据
至此,我们可以把 x \textstyle x 用 (u1,u2) \textstyle (u_1, u_2) 基表达为:
\begin{align} x_{\rm rot} = U^Tx = \begin{bmatrix} u_1^Tx \\ u_2^Tx \end{bmatrix} \end{align}
(下标“rot”来源于单词“rotation”,意指这是原数据经过旋转(也可以说成映射)后得到的结果)
对数据集中的每个样本 i \textstyle i 分别进行旋转: x(i)rot=UTx(i) \textstyle x_{\rm rot}^{(i)} = U^Tx^{(i)} for every i \textstyle i ,然后把变换后的数据 xrot \textstyle x_{\rm rot} 显示在坐标图上,可得:
这就是把训练数据集旋转到 u1,u2 \textstyle u_1,\textstyle u_2 基后的结果。一般而言,运算 UTx \textstyle U^Tx 表示旋转到基 u1,u2,...,un \textstyle u_1,\textstyle u_2, ...,\textstyle u_n 之上的训练数据。矩阵 U \textstyle U 有正交性,即满足 UTU=UUT=I \textstyle U^TU = UU^T = I ,所以若想将旋转后的向量 xrot \textstyle x_{\rm rot} 还原为原始数据 x \textstyle x ,将其左乘矩阵 U \textstyle U即可: x=Uxrot \textstyle x=U x_{\rm rot} , 验算一下: Uxrot=UUTx=x. \textstyle U x_{\rm rot} = UU^T x = x.
数据降维
数据的主方向就是旋转数据的第一维 xrot,1 \textstyle x_{{\rm rot},1} 。因此,若想把这数据降到一维,可令:

更一般的,假如想把数据 x∈Rn降到k \textstyle x \in \Re^n 降到 \textstyle k 维表示 x~∈Rk(令k<n) \textstyle \tilde{x} \in \Re^k (令 \textstyle k ,只需选取 xrot \textstyle x_{\rm rot} 的前 k \textstyle k 个成分,分别对应前 k \textstyle k 个数据变化的主方向。
PCA的另外一种解释是: xrot \textstyle x_{\rm rot} 是一个 n \textstyle n 维向量,其中前几个成分可能比较大(例如,上例中大部分样本第一个成分 x(i)rot,1=uT1x(i) \textstyle x_{{\rm rot},1}^{(i)} = u_1^Tx^{(i)} 的取值相对较大),而后面成分可能会比较小(例如,上例中大部分样本的 x(i)rot,2=uT2x(i) \textstyle x_{{\rm rot},2}^{(i)} = u_2^Tx^{(i)} 较小)。
PCA算法做的其实就是丢弃 xrot \textstyle x_{\rm rot} 中后面(取值较小)的成分,就是将这些成分的值近似为零。具体的说,设 x~是xrot \textstyle \tilde{x} 是 \textstyle x_{{\rm rot}} 的近似表示,那么将 xrot \textstyle x_{{\rm rot}} 除了前 k \textstyle k 个成分外,其余全赋值为零,就得到:
\begin{align} \tilde{x} = \begin{bmatrix} x_{{\rm rot},1} \\ \vdots \\ x_{{\rm rot},k} \\ 0 \\ \vdots \\ 0 \\ \end{bmatrix} \approx \begin{bmatrix} x_{{\rm rot},1} \\ \vdots \\ x_{{\rm rot},k} \\ x_{{\rm rot},k+1} \\ \vdots \\ x_{{\rm rot},n} \end{bmatrix} = x_{\rm rot} \end{align}
在本例中,可得 x~ \textstyle \tilde{x} 的点图如下(取 n=2,k=1 \textstyle n=2, k=1 ):
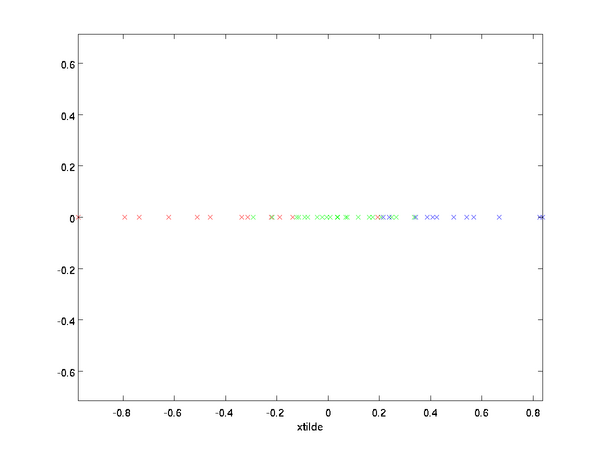
然而,由于上面 x~的后n−k \textstyle \tilde{x} 的后\textstyle n-k项均为零,没必要把这些零项保留下来。所以,我们仅用前 k \textstyle k 个(非零)成分来定义 k \textstyle k 维向量 x~ \textstyle \tilde{x} 。
这也解释了我们为什么会以 u1,u2,…,un \textstyle u_1, u_2, \ldots, u_n 为基来表示数据:要决定保留哪些成分变得很简单,只需取前 k \textstyle k 个成分即可。这时也可以说,我们“保留了前 k \textstyle k 个PCA(主)成分”。
还原近似数据
现在,我们得到了原始数据 x∈Rn \textstyle x \in \Re^n 的低维“压缩”表征量 x~∈Rk \textstyle \tilde{x} \in \Re^k , 反过来,如果给定 x~ \textstyle \tilde{x} ,我们应如何还原原始数据 x \textstyle x 呢?查看以往章节以往章节可知,要转换回来,只需 x=Uxrot \textstyle x = U x_{\rm rot} 即可。进一步,我们把 x~ \textstyle \tilde{x} 看作将 xrot \textstyle x_{\rm rot} 的最后 n−k \textstyle n-k 个元素被置0所得的近似表示,因此如果给定 x~∈Rk \textstyle \tilde{x} \in \Re^k ,可以通过在其末尾添加 n−k个0 \textstyle n-k 个0来得到对 xrot∈Rn \textstyle x_{\rm rot} \in \Re^n 的近似,最后,左乘 U \textstyle U 便可近似还原出原数据 x \textstyle x 。具体来说,计算如下:
\begin{align} \hat{x} = U \begin{bmatrix} \tilde{x}_1 \\ \vdots \\ \tilde{x}_k \\ 0 \\ \vdots \\ 0 \end{bmatrix} = \sum_{i=1}^k u_i \tilde{x}_i. \end{align}
上面的等式基于先前对 \textstyle U 的定义。在实现时,我们实际上并不先给 x~ \textstyle \tilde{x} 填0然后再左乘 U \textstyle U ,因为这意味着大量的乘0运算。我们可用 x~∈Rk \textstyle \tilde{x} \in \Re^k 来与 U \textstyle U 的前 k \textstyle k 列相乘,即上式中最右项,来达到同样的目的。将该算法应用于本例中的数据集,可得如下关于重构数据 x^ \textstyle \hat{x} 的点图:
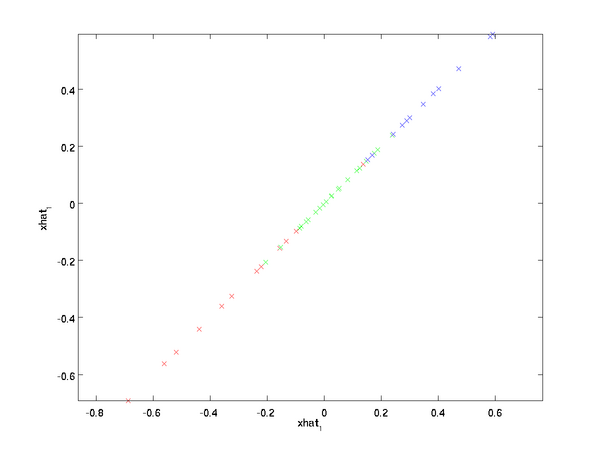
由图可见,我们得到的是对原始数据集的一维近似重构。
在训练自动编码器或其它无监督特征学习算法时,算法运行时间将依赖于输入数据的维数。若用 x~∈Rk \textstyle \tilde{x} \in \Re^k 取代 x \textstyle x 作为输入数据,那么算法就可使用低维数据进行训练,运行速度将显著加快。对于很多数据集来说,低维表征量 x~ \textstyle \tilde{x} 是原数据集的极佳近似,因此在这些场合使用PCA是很合适的,它引入的近似误差的很小,却可显著地提高你算法的运行速度。
选择主成分个数
我们该如何选择 k \textstyle k ,即保留多少个PCA主成分?在上面这个简单的二维实验中,保留第一个成分看起来是自然的选择。对于高维数据来说,做这个决定就没那么简单:如果 k \textstyle k 过大,数据压缩率不高,在极限情况 k=n \textstyle k=n 时,等于是在使用原始数据(只是旋转投射到了不同的基);相反地,如果 k \textstyle k 过小,那数据的近似误差太太。
决定 k \textstyle k 值时,我们通常会考虑不同 k \textstyle k 值可保留的方差百分比。具体来说,如果 k=n \textstyle k=n ,那么我们得到的是对数据的完美近似,也就是保留了100%的方差,即原始数据的所有变化都被保留下来;相反,如果 k=0 \textstyle k=0 ,那等于是使用零向量来逼近输入数据,也就是只有0%的方差被保留下来。
一般而言,设 λ1,λ2,…,λn \textstyle \lambda_1, \lambda_2, \ldots, \lambda_n 表示 Σ \textstyle \Sigma 的特征值(按由大到小顺序排列),使得 λj \textstyle \lambda_j 为对应于特征向量 uj \textstyle u_j 的特征值。那么如果我们保留前 k \textstyle k 个成分,则保留的方差百分比可计算为:

在上面简单的二维实验中, λ1=7.29,λ2=0.69。 \textstyle \lambda_1 = 7.29 ,\textstyle \lambda_2 = 0.69 。因此,如果保留 k=1 \textstyle k=1 个主成分,等于我们保留了 7.29/(7.29+0.69)=0.913 \textstyle 7.29/(7.29+0.69) = 0.913 ,即91.3%的方差。
对保留方差的百分比进行更正式的定义已超出了本教程的范围,但很容易证明, λj=∑mi=1x2rot,j \textstyle \lambda_j = \sum_{i=1}^m x_{{\rm rot},j}^2 。因此,如果 λj≈0,则说明xrot,j \textstyle \lambda_j \approx 0 ,则说明 \textstyle x_{{\rm rot},j} 也就基本上接近于0,所以用0来近似它并不会产生多大损失。这也解释了为什么要保留前面的主成分(对应的 λj \textstyle \lambda_j 值较大)而不是末尾的那些。 这些前面的主成分 xrot,j \textstyle x_{{\rm rot},j} 变化性更大,取值也更大,如果将其设为0势必引入较大的近似误差。
以处理图像数据为例,一个惯常的经验法则是选择 \textstyle k 以保留99%的方差,换句话说,我们选取满足以下条件的最小 k \textstyle k 值:
\begin{align} \frac{\sum_{j=1}^k \lambda_j}{\sum_{j=1}^n \lambda_j} \geq 0.99. \end{align}
对其它应用,如不介意引入稍大的误差,有时也保留90-98%的方差范围。若向他人介绍PCA算法详情,告诉他们你选择的 k \textstyle k 保留了95%的方差,比告诉他们你保留了前120个(或任意某个数字)主成分更好理解。
对图像数据应用PCA算法
为使PCA算法能有效工作,通常我们希望所有的特征 x1,x2,…,xn \textstyle x_1, x_2, \ldots, x_n 都有相似的取值范围(并且均值接近于0)。如果你曾在其它应用中使用过PCA算法,你可能知道有必要单独对每个特征做预处理,即通过估算每个特征 xj \textstyle x_j 的均值和方差,而后将其取值范围规整化为零均值和单位方差。但是,对于大部分图像类型,我们却不需要进行这样的预处理。假定我们将在自然图像上训练算法,此时特征 xj \textstyle x_j 代表的是像素 j \textstyle j 的值。所谓“自然图像”,不严格的说,是指人或动物在他们一生中所见的那种图像。
注:通常我们选取含草木等内容的户外场景图片,然后从中随机截取小图像块(如16x16像素)来训练算法。在实践中我们发现,大多数特征学习算法对训练图片的确切类型并不敏感,所以大多数用普通照相机拍摄的图片,只要不是特别的模糊或带有非常奇怪的人工痕迹,都可以使用。
在自然图像上进行训练时,对每一个像素单独估计均值和方差意义不大,因为(理论上)图像任一部分的统计性质都应该和其它部分相同,图像的这种特性被称作平稳性(stationarity)。
具体而言,为使PCA算法正常工作,我们通常需要满足以下要求:(1)特征的均值大致为0;(2)不同特征的方差值彼此相似。对于自然图片,即使不进行方差归一化操作,条件(2)也自然满足,故而我们不再进行任何方差归一化操作(对音频数据,如声谱,或文本数据,如词袋向量,我们通常也不进行方差归一化)。实际上,PCA算法对输入数据具有缩放不变性,无论输入数据的值被如何放大(或缩小),返回的特征向量都不改变。更正式的说:如果将每个特征向量 x \textstyle x 都乘以某个正数(即所有特征量被放大或缩小相同的倍数),PCA的输出特征向量都将不会发生变化。
既然我们不做方差归一化,唯一还需进行的规整化操作就是均值规整化,其目的是保证所有特征的均值都在0附近。根据应用,在大多数情况下,我们并不关注所输入图像的整体明亮程度。比如在对象识别任务中,图像的整体明亮程度并不会影响图像中存在的是什么物体。更为正式地说,我们对图像块的平均亮度值不感兴趣,所以可以减去这个值来进行均值规整化。
具体的步骤是,如果 x(i)∈Rn \textstyle x^{(i)} \in \Re^{n} 代表16x16的图像块的亮度(灰度)值( n=256 \textstyle n=256 ),可用如下算法来对每幅图像进行零均值化操作:
μ(i):=1n∑nj=1x(i)j \mu^{(i)} := \frac{1}{n} \sum_{j=1}^n x^{(i)}_j
x(i)j:=x(i)j−μ(i),forallj x^{(i)}_j := x^{(i)}_j - \mu^{(i)}, for all \textstyle j
请注意:1)对每个输入图像块 x(i) \textstyle x^{(i)} 都要单独执行上面两个步骤,2)这里的 μ(i) \textstyle \mu^{(i)} 是指图像块 x(i) \textstyle x^{(i)} 的平均亮度值。尤其需要注意的是,这和为每个像素 xj \textstyle x_j 单独估算均值是两个完全不同的概念。
如果你处理的图像并非自然图像(比如,手写文字,或者白背景正中摆放单独物体),其他规整化操作就值得考虑了,而哪种做法最合适也取决于具体应用场合。但对自然图像而言,对每幅图像进行上述的零均值规整化,是默认而合理的处理。
PCA白化
我们已经了解了如何使用PCA降低数据维度。在一些算法中还需要一个与之相关的预处理步骤,这个预处理过程称为白化(一些文献中也叫sphering)。举例来说,假设训练数据是图像,由于图像中相邻像素之间具有很强的相关性,所以用于训练时输入是冗余的。白化的目的就是降低输入的冗余性;更正式的说,我们希望通过白化过程使得学习算法的输入具有如下性质:(i)特征之间相关性较低;(ii)所有特征具有相同的方差。
如何消除输入特征之间的相关性? 在前文计算 x(i)rot=UTx(i) \textstyle x_{\rm rot}^{(i)} = U^Tx^{(i)} 时实际上已经消除了输入特征 x(i) \textstyle x^{(i)}之间的相关性。得到的新特征 xrot \textstyle x_{\rm rot} 的分布如下图所示:
这个数据的协方差矩阵如下:
\begin{align} \begin{bmatrix} 7.29 & 0 \\ 0 & 0.69 \end{bmatrix}. \end{align}
(注: 严格地讲, 这部分许多关于“协方差”的陈述仅当数据均值为0时成立。下文的论述都隐式地假定这一条件成立。不过即使数据均值不为0,下文的说法仍然成立,所以你无需担心这个。)
xrot \textstyle x_{\rm rot} 协方差矩阵对角元素的值为 λ1 \textstyle \lambda_1 和 λ2 \textstyle \lambda_2 绝非偶然。并且非对角元素值为0; 因此, xrot,1和xrot,2 \textstyle x_{{\rm rot},1} 和 \textstyle x_{{\rm rot},2} 是不相关的, 满足我们对白化结果的第一个要求 (特征间相关性降低)。
为了使每个输入特征具有单位方差,我们可以直接使用 1/λi−−√ \textstyle 1/\sqrt{\lambda_i} 作为缩放因子来缩放每个特征 xrot,i \textstyle x_{{\rm rot},i} 。具体地,我们定义白化后的数据 xPCAwhite∈Rn \textstyle x_{{\rm PCAwhite}} \in \Re^n 如下:
\begin{align} x_{{\rm PCAwhite},i} = \frac{x_{{\rm rot},i} }{\sqrt{\lambda_i}}. \end{align}
绘制出 xPCAwhite \textstyle x_{{\rm PCAwhite}} ,我们得到:
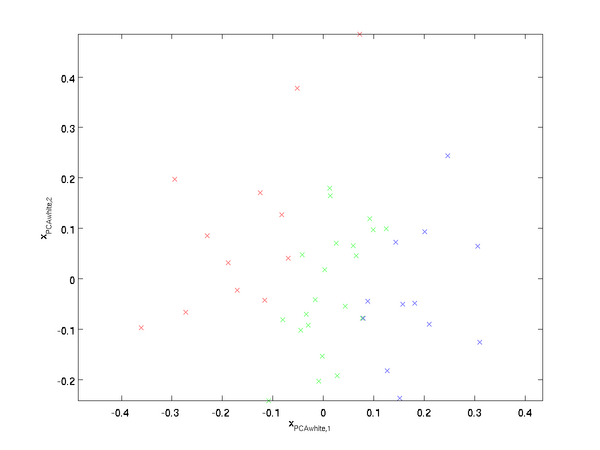
这些数据现在的协方差矩阵为单位矩阵 I \textstyle I 。我们说, xPCAwhite \textstyle x_{{\rm PCAwhite}} 是数据经过PCA白化后的版本: xPCAwhite \textstyle x_{{\rm PCAwhite}} 中不同的特征之间不相关并且具有单位方差。
白化与降维相结合。 如果你想要得到经过白化后的数据,并且比初始输入维数更低,可以仅保留 xPCAwhite \textstyle x_{{\rm PCAwhite}} 中前 k \textstyle k 个成分。当我们把PCA白化和正则化结合起来时(在稍后讨论), xPCAwhite \textstyle x_{{\rm PCAwhite}} 中最后的少量成分将总是接近于0,因而舍弃这些成分不会带来很大的问题。
ZCA白化
最后要说明的是,使数据的协方差矩阵变为单位矩阵 I \textstyle I 的方式并不唯一。具体地,如果 R \textstyle R 是任意正交矩阵,即满足 RRT=RTR=I \textstyle RR^T = R^TR = I (说它正交不太严格, R \textstyle R 可以是旋转或反射矩阵), 那么 RxPCAwhite \textstyle R \,x_{\rm PCAwhite} 仍然具有单位协方差。在ZCA白化中,令 R=U \textstyle R = U 。我们定义ZCA白化的结果为:
\begin{align} x_{\rm ZCAwhite} = U x_{\rm PCAwhite} \end{align}
绘制 xZCAwhite \textstyle x_{\rm ZCAwhite},得到:
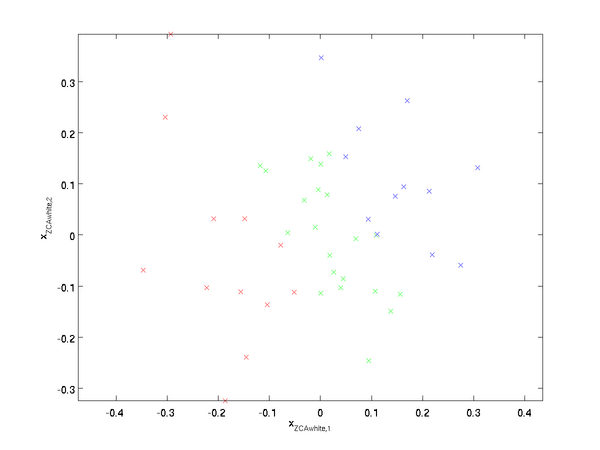
可以证明,对所有可能的 R \textstyle R,这种旋转使得 xZCAwhite \textstyle x_{\rm ZCAwhite} 尽可能地接近原始输入数据 x \textstyle x 。
当使用 ZCA白化时(不同于 PCA白化),我们通常保留数据的全部 n \textstyle n 个维度,不尝试去降低它的维数。
正则化
实践中需要实现PCA白化或ZCA白化时,有时一些特征值 λi \textstyle \lambda_i 在数值上接近于0,这样在缩放步骤时我们除以 λi−−√ \sqrt{\lambda_i} 将导致除以一个接近0的值;这可能使数据上溢 (赋为大数值)或造成数值不稳定。因而在实践中,我们使用少量的正则化实现这个缩放过程,即在取平方根和倒数之前给特征值加上一个很小的常数 \textstyle \epsilon:
\begin{align} x_{{\rm PCAwhite},i} = \frac{x_{{\rm rot},i} }{\sqrt{\lambda_i + \epsilon}}. \end{align}
当 x \textstyle x 在区间 [−1,1] \textstyle [-1,1] 上时, 一般取值为 ϵ≈10−5 \textstyle \epsilon \approx 10^{-5}。
对图像来说, 这里加上 ϵ \textstyle \epsilon ,对输入图像也有一些平滑(或低通滤波)的作用。这样处理还能消除在图像的像素信息获取过程中产生的噪声,改善学习到的特征(细节超出了本文的范围)。
ZCA 白化是一种数据预处理方法,它将数据从 x \textstyle x 映射到 xZCAwhite \textstyle x_{\rm ZCAwhite} 。 事实证明这也是一种生物眼睛(视网膜)处理图像的粗糙模型。具体而言,当你的眼睛感知图像时,由于一幅图像中相邻的部分在亮度上十分相关,大多数临近的“像素”在眼中被感知为相近的值。因此,如果人眼需要分别传输每个像素值(通过视觉神经)到大脑中,会非常不划算。取而代之的是,视网膜进行一个与ZCA中相似的去相关操作 (这是由视网膜上的ON-型和OFF-型光感受器细胞将光信号转变为神经信号完成的)。由此得到对输入图像的更低冗余的表示,并将它传输到大脑。
深度学习入门---PCA,白化相关推荐
- 深度学习入门教程UFLDL学习实验笔记三:主成分分析PCA与白化whitening
深度学习入门教程UFLDL学习实验笔记三:主成分分析PCA与白化whitening 主成分分析与白化是在做深度学习训练时最常见的两种预处理的方法,主成分分析是一种我们用的很多的降维的一种手段,通 ...
- 给深度学习入门者的Python快速教程 - 番外篇之Python-OpenCV
转载自:https://zhuanlan.zhihu.com/p/24425116 本篇是前面两篇教程:给深度学习入门者的Python快速教程 - 基础篇 给深度学习入门者的Python快速教程 - ...
- 【《深度学习入门》—— 学习笔记(一)】
<深度学习入门>-- 学习笔记(一)_1-4章 第一章 Python入门 略 第二章 感知机(Perception) 2.1 感知机是什么 感知机接收多个输入信号,输出一个信号.x1, x ...
- 深度学习入门笔记(一):机器学习基础
专栏--深度学习入门笔记 推荐文章 深度学习入门笔记(一):机器学习基础 深度学习入门笔记(二):神经网络基础 深度学习入门笔记(三):感知机 深度学习入门笔记(四):神经网络 深度学习入门笔记(五) ...
- 机器学习与深度学习入门环境安装
机器学习与深度学习入门环境安装 1.编程语言 2.开发平台 3.机器学习工具包 4.深度学习框架 1.编程语言 Python:"胶水语言",集成度高,简单实用,受众面广,开发者社区 ...
- 深度学习入门(上)01(用cifar数据实现三层网络实现图片分类)
目录 1-1深度学习入门-imagenet图像分类比赛 1-2计算机视觉面临的挑战和常规套路 1-3 K近邻进行图像分类 KNN的实现步骤 KNN总结 KNN的问题: 数据库样例: 测试结果 最近邻实 ...
- 【AI参赛经验】深度学习入门指南:从零开始TinyMind汉字书法识别——by:Link
各位人工智能爱好者,大家好! 由TinyMind发起的#第一届汉字书法识别挑战赛#正在火热进行中,比赛才开始3周,已有数只黑马冲进榜单.目前TOP54全部为90分以上!可谓竞争激烈,高手如林.不是比赛 ...
- 深度学习入门,一文讲解神经网络的构成、训练和算法
小白深度学习入门系列 神经网络的构成.训练和算法 什么是神经网络 人工神经网络(Artificial Neural Network,ANN),简称神经网络(Neural Network,NN),是一种 ...
- PyTorch深度学习入门与实战(案例视频精讲)
作者:孙玉林,余本国 著 出版社:中国水利水电出版社 品牌:智博尚书 出版时间:2020-07-01 PyTorch深度学习入门与实战(案例视频精讲)
最新文章
- eclipse自动排版快捷键、自动引入包
- geyser学习记录(day2):我们在命令行当中怎么使用这个架构?
- 加固前奏2-替换application
- 日常生活 -- 嵌入式面试
- linux screen 进程,screen 命令使用
- Qt工作笔记-使用QGraphicsItem加载图片并实现碰撞
- Linux C 错误 invalid application of 'sizeof' to incomplete type 解决方案
- 高通计划通过多层级骁龙5G移动平台 加速5G商业化
- 停滞数年后,ElasticJob 携首个 Apache 版本 3.0.0-alpha 回归!
- 为什么 C 语言仍然占据统治地位?
- 有人用语音识别写作吗,如果没有,为什么?
- 转 jquery使用技巧小结
- Java学习日志(19-3-IO流-字节流操作)
- Android的Service组件
- Missing Push Notification Entitlement警告-----以及解决方法
- STL map 的基本成员函数
- 05 - 雷达的发展与应用
- 给新服务器装linux系统,新服务器安装linux系统安装教程
- 拟人拟物法求解不等圆Packing问题
- 点计算机管理没反应,电脑任务栏没反应怎么办 任务栏没反应解决方法
热门文章
- 用nginx的stream转发tcp/udp请求
- 【苹果相册推】软件安装ipv6得到可由Apple使用ArrayList tmpMacList
- 错误:Error: Could not open client transport with JDBC Uri: jdbc:hive2://ducking:10000: java.net.Connec
- 滴水逆向 switch
- 把EXCEL拆分成两个窗口的办法
- 支付宝出安全漏洞,买了账户安全险的也要小心
- 数据人故事——【五花肉】7年数据产品的职业成长之路
- 如何用将top命令的结果写入txt?
- ipados 蓝牙 android,iPadOS13.4对于无线或蓝牙鼠标的兼容性… - Apple 社区
- 前端开发也要知道的 DNS