GPS NMEA 0183 4.10协议/GPS Linux串口驱动
下图为GYM-1010-B 北斗导航模块,同时支持北斗二代 B1、GPS L1 信号, 支持协议 NMEA 0183 4.10 版本,默认波特率9600bps,数据位8bit,无校验位,停止位1bit;默认输出频率1HZ

基本上接上天线,供电引脚电压正常的话,就可以通过串口读取GPS数据了(GPS芯片会源源不断的输出数据)。所以GPS编程最主要的是解析数据,要解析数据就得了解协议格式。北斗导航模块输出 6 条 NAME 协议,分别为 GPGGA、GPGLL、GPGSA、GPGSV、GPRMC 和 GPVTG 等 6 条协议。
一、下面详细学习这六种不同的输出协议的数据格式。
(1) $GPGGA (GPS定位信息)
协议格式:
- $GNGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*hh<CR><LF>
样例数据:
- $GPGGA,161229.487,3723.2475,N,12158.3416,W,1,07,1.0,9.0,M, , ,,0000*18
协议格式详细分析:
![]()
![]()
(2) $GPGLL (地理定位信息)
协议格式:
- $GPGLL,<1>,<2>,<3>,<4>,<5>,<6>*hh<CR><LF>
样例数据:
- $GPGLL,3723.2475,N,12158.3416,W,161229.487,A*2C
协议格式详细分析:
![]()
(3) $GPGSA (当前卫星信息)
协议格式:
- $GPGSA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>,<15>,<16>,<17>*hh<CR><LF>
样例数据:
- $GPGSA,A,3,07,02,26,27,09,04,15, , , , , ,1.8,1.0,1.5*33
协议格式详细分析:
![]()
![]()
(4) $GPGSV(可见卫星信息)
协议格式:
- $GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,...,<4>,<5>,<6>,<7>*hh<CR><LF>
样例数据:
- $GPGSV,2,1,07,07,79,048,42,02,51,062,43,26,36,256,42,27,27,138,42*71
- $GPGSV,2,2,07,09,23,313,42,04,19,159,41,15,12,041,42*41
需要注意的是这里的样例数据有2条,这是因为当前可见卫星一共有7个,但是每条语句最多包括四颗卫星的信息,所以分成了2条语句。每颗卫星的信息有四个数据项,即:<4>(卫星编号)、<5>(卫星仰角)、<6>(卫星方位角)、<7>(信噪比)。
协议格式详细分析(只分析第1条样例数据语句):
![]()
(5) $GPRMC(最简定位信息)
协议格式:
- $GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>*hh<CR><LF>
样例数据:
- $GPRMC,161229.487,A,3723.2475,N,12158.3416,W,0.13,309.62,120598,,*10
协议格式详细分析:
![]()
(6) $GPVTG(地面速度信息)
协议格式:
- $GPVTG,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>*hh<CR><LF>
样例数据:
- $GPVTG,309.62,T, ,M,0.13,N,0.2,K*6E
协议格式详细分析:
![]()
有了上面对NMEA0183协议的详细学习,剩下的就是串口编程了。无论是通过单片机,还是Windows/WinCE/Linux系统,编写串口程序把这些数据读取到都是比较容易的,剩下就是通过c++那些查找算法函数,或者MFC CString字符串的相关函数进行解析就OK了。
二、Linux串口驱动分析设计
A、核心数据结构
串口驱动有3个核心数据结构,它们都定义在<#include linux/serial_core.h>
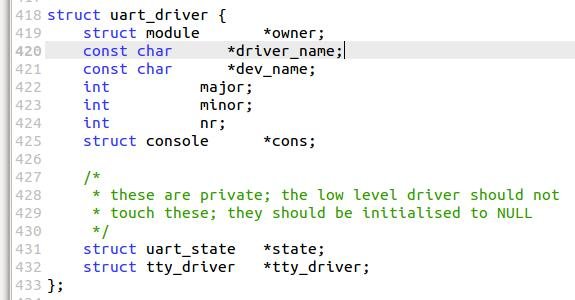
1、uart_driver
uart_driver包含了串口设备名、串口驱动名、主次设备号、串口控制台(可选)等信息,还封装了tty_driver(底层串口驱动无需关心tty_driver)。
2、uart_port
uart_port用于描述串口端口的I/O端口或I/O内存地址、FIFO大小、端口类型、串口时钟等信息。实际上,一个uart_port实例对应一个串口设备.
struct uart_port {
spinlock_t lock; /* 串口端口锁 */
unsigned int iobase; /* IO端口基地址 */
unsigned char __iomem *membase; /* IO内存基地址,经映射(如ioremap)后的IO内存虚拟基地址 */
unsigned int irq; /* 中断号 */
unsigned int uartclk; /* 串口时钟 */
unsigned int fifosize; /* 串口FIFO缓冲大小 */
unsigned char x_char; /* xon/xoff字符 */
unsigned char regshift; /* 寄存器位移 */
unsigned char iotype; /* IO访问方式 */
unsigned char unused1;
#define UPIO_PORT (0) /* IO端口 */
#define UPIO_HUB6 (1)
#define UPIO_MEM (2) /* IO内存 */
#define UPIO_MEM32 (3)
#define UPIO_AU (4) /* Au1x00 type IO */
#define UPIO_TSI (5) /* Tsi108/109 type IO */
#define UPIO_DWAPB (6) /* DesignWare APB UART */
#define UPIO_RM9000 (7) /* RM9000 type IO */
unsigned int read_status_mask; /* 关心的Rx error status */
unsigned int ignore_status_mask;/* 忽略的Rx error status */
struct uart_info *info; /* pointer to parent info */
struct uart_icount icount; /* 计数器 */
struct console *cons; /* console结构体 */
#ifdef CONFIG_SERIAL_CORE_CONSOLE
unsigned long sysrq; /* sysrq timeout */
#endif
upf_t flags;
#define UPF_FOURPORT ((__force upf_t) (1 << 1))
#define UPF_SAK ((__force upf_t) (1 << 2))
#define UPF_SPD_MASK ((__force upf_t) (0x1030))
#define UPF_SPD_HI ((__force upf_t) (0x0010))
#define UPF_SPD_VHI ((__force upf_t) (0x0020))
#define UPF_SPD_CUST ((__force upf_t) (0x0030))
#define UPF_SPD_SHI ((__force upf_t) (0x1000))
#define UPF_SPD_WARP ((__force upf_t) (0x1010))
#define UPF_SKIP_TEST ((__force upf_t) (1 << 6))
#define UPF_AUTO_IRQ ((__force upf_t) (1 << 7))
#define UPF_HARDPPS_CD ((__force upf_t) (1 << 11))
#define UPF_LOW_LATENCY ((__force upf_t) (1 << 13))
#define UPF_BUGGY_UART ((__force upf_t) (1 << 14))
#define UPF_MAGIC_MULTIPLIER ((__force upf_t) (1 << 16))
#define UPF_CONS_FLOW ((__force upf_t) (1 << 23))
#define UPF_SHARE_IRQ ((__force upf_t) (1 << 24))
#define UPF_BOOT_AUTOCONF ((__force upf_t) (1 << 28))
#define UPF_FIXED_PORT ((__force upf_t) (1 << 29))
#define UPF_DEAD ((__force upf_t) (1 << 30))
#define UPF_IOREMAP ((__force upf_t) (1 << 31))
#define UPF_CHANGE_MASK ((__force upf_t) (0x17fff))
#define UPF_USR_MASK ((__force upf_t) (UPF_SPD_MASK|UPF_LOW_LATENCY))
unsigned int mctrl; /* 当前的moden设置 */
unsigned int timeout; /* character-based timeout */
unsigned int type; /* 端口类型 */
const struct uart_ops *ops; /* 串口端口操作函数集 */
unsigned int custom_divisor;
unsigned int line; /* 端口索引 */
resource_size_t mapbase; /* IO内存物理基地址,可用于ioremap */
struct device *dev; /* 父设备 */
unsigned char hub6; /* this should be in the 8250 driver */
unsigned char suspended;
unsigned char unused[2];
void *private_data; /* 端口私有数据,一般为platform数据指针 */
};
uart_iconut为串口信息计数器,包含了发送字符计数、接收字符计数等。在串口的发送中断处理函数和接收中断处理函数中,我们需要管理这些计数。
struct uart_icount {
__u32 cts;
__u32 dsr;
__u32 rng;
__u32 dcd;
__u32 rx; /* 发送字符计数 */
__u32 tx; /* 接受字符计数 */
__u32 frame; /* 帧错误计数 */
__u32 overrun; /* Rx FIFO溢出计数 */
__u32 parity; /* 帧校验错误计数 */
__u32 brk; /* break计数 */
__u32 buf_overrun;
};
uart_info有两个成员在底层串口驱动会用到:xmit和tty。用户空间程序通过串口发送数据时,上层驱动将用户数据保存在xmit;而串口发送中断处理函数就是通过xmit获取到用户数据并将它们发送出去。串口接收中断处理函数需要通过tty将接收到的数据传递给行规则层。
/* uart_info实例仅在串口端口打开时有效,它可能在串口关闭时被串口核心层释放。因此,在使用uart_port的uart_info成员时必须保证串口已打开。底层驱动和核心层驱动都可以修改uart_info实例。
* This is the state information which is only valid when the port
* is open; it may be freed by the core driver once the device has
* been closed. Either the low level driver or the core can modify
* stuff here.
*/
struct uart_info {
struct tty_struct *tty;
struct circ_buf xmit;
uif_t flags;
/*
* Definitions for info->flags. These are _private_ to serial_core, and
* are specific to this structure. They may be queried by low level drivers.
*/
#define UIF_CHECK_CD ((__force uif_t) (1 << 25))
#define UIF_CTS_FLOW ((__force uif_t) (1 << 26))
#define UIF_NORMAL_ACTIVE ((__force uif_t) (1 << 29))
#define UIF_INITIALIZED ((__force uif_t) (1 << 31))
#define UIF_SUSPENDED ((__force uif_t) (1 << 30))
int blocked_open;
struct tasklet_struct tlet;
wait_queue_head_t open_wait;
wait_queue_head_t delta_msr_wait;
};
3、uart_ops
uart_ops涵盖了串口驱动可对串口设备进行的所有操作。
/*
* This structure describes all the operations that can be
* done on the physical hardware.
*/
struct uart_ops {
unsigned int (*tx_empty)(struct uart_port *); /* 串口的Tx FIFO缓存是否为空 */
void (*set_mctrl)(struct uart_port *, unsigned int mctrl); /* 设置串口modem控制 */
unsigned int (*get_mctrl)(struct uart_port *); /* 获取串口modem控制 */
void (*stop_tx)(struct uart_port *); /* 禁止串口发送数据 */
void (*start_tx)(struct uart_port *); /* 使能串口发送数据 */
void (*send_xchar)(struct uart_port *, char ch);/* 发送xChar */
void (*stop_rx)(struct uart_port *); /* 禁止串口接收数据 */
void (*enable_ms)(struct uart_port *); /* 使能modem的状态信号 */
void (*break_ctl)(struct uart_port *, int ctl); /* 设置break信号 */
int (*startup)(struct uart_port *); /* 启动串口,应用程序打开串口设备文件时,该函数会被调用 */
void (*shutdown)(struct uart_port *); /* 关闭串口,应用程序关闭串口设备文件时,该函数会被调用 */
void (*set_termios)(struct uart_port *, struct ktermios *new, struct ktermios*old); /* 设置串口参数 */
void (*pm)(struct uart_port *, unsigned int state,
unsigned int oldstate); /* 串口电源管理 */
int (*set_wake)(struct uart_port *, unsigned int state); /* */
const char *(*type)(struct uart_port *); /* 返回一描述串口类型的字符串 */
void (*release_port)(struct uart_port *); /* 释放串口已申请的IO端口/IO内存资源,必要时还需iounmap */
int (*request_port)(struct uart_port *); /* 申请必要的IO端口/IO内存资源,必要时还可以重新映射串口端口 */
void (*config_port)(struct uart_port *, int); /* 执行串口所需的自动配置 */
int (*verify_port)(struct uart_port *, struct serial_struct *); /* 核实新串口的信息 */
int (*ioctl)(struct uart_port *, unsigned int, unsigned long); /* IO控制 */
};
/* 功能: uart_register_driver用于将串口驱动uart_driver注册到内核(串口核心层)中,通常在模块初始化函数调用该函数。
/* 功能: uart_unregister_driver用于注销我们已注册的uart_driver,通常在模块卸载函数调用该函数
/* 功能: uart_add_one_port用于为串口驱动添加一个串口端口,通常在探测到设备后(驱动的设备probe方法)调用该函数
/* 功能: uart_remove_one_port用于删除一个已添加到串口驱动中的串口端口,通常在驱动卸载时调用该函数
/* 功能: uart_write_wakeup唤醒上层因向串口端口写数据而阻塞的进程,通常在串口发送中断处理函数中调用该函数
/* 功能: uart_suspend_port用于挂起特定的串口端口
/* 功能: uart_resume_port用于恢复某一已挂起的串口
/* 功能: uart_get_baud_rate通过解码termios结构体来获取指定串口的波特率
/* 功能: uart_get_divisor用于计算某一波特率的串口时钟分频数(串口波特率除数)
/* 功能: uart_update_timeout用于更新(设置)串口FIFO超时时间
/* 功能:uart_match_port用于判断两串口端口是否为同一端口
/* 功能: uart_console_write用于向串口端口写一控制台信息
三、针对 GYM-1010-B 串口的编写
struct platform_device {
2、platform驱动。platform设备由platform驱动进行管理。当设备加入到系统中时,platform_driver的probe方法会被调用来见对应的设备添加或者注册到内核;当设备从系统中移除时,platform_driver的remove方法会被调用来做一些清理工作,如移除该设备的一些实例、注销一些已注册到系统中去的东西。
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*suspend_late)(struct platform_device *, pm_message_t state);
int (*resume_early)(struct platform_device *);
int (*resume)(struct platform_device *);
struct device_driver driver;
};
更详细platform资料可参考其他资料,略。。。。。。。。。。
下面是串口驱动例子和其GPS测试程序源码 .....
GPS NMEA 0183 4.10协议/GPS Linux串口驱动相关推荐
- linux 串口驱动 理解,linux 串口驱动 理解
linux 串口 驱动 理解 一.核心数据结构 串口驱动有3个核心数据结构,它们都定义在 1.uart_driver uart_driver包含了串口设备名.串口驱动名.主次设备号.串口控制台(可选) ...
- minmea——GPS NMEA 0183 协议解析库
今天给大家推荐一个纯C语言编写,轻量级的GPS NMEA 0183协议解析库:minmea github地址:https://github.com/kosma/minmea 一.特点 1.C99标准编 ...
- linux串口驱动分析
linux串口驱动分析 硬件资源及描写叙述 s3c2440A 通用异步接收器和发送器(UART)提供了三个独立的异步串行 I/O(SIO)port,每一个port都能够在中断模式或 DMA 模式下操作 ...
- Linux串口驱动(2) - 线路规程
1. 注册tty的ldisc ldisc全称 line discipline(线路规程),因为历史原因,tty属于一类设备,而串口设备只是其中一种,所以该模块负责将用户操作桥接到不同的tty驱动.从代 ...
- Linux串口驱动(3) - open详解
1. 用户空间open的操作实现 串口设备是被注册为字符设备的,在注册过程中填充了struct file_operations tty_fops结构体,该结构体中的成员open.read.write等 ...
- 正点原子linux串口驱动下载,「正点原子Linux连载」第六十三章Linux RS232/485/GPS驱动实验...
1)实验平台:正点原子Linux开发板 2)摘自<正点原子I.MX6U嵌入式Linux驱动开发指南>关注官方微信号公众号,获取更多资料:正点原子 第六十三章Linux RS232/485/ ...
- linux串口驱动分析【转】
转自:http://blog.csdn.net/hanmengaidudu/article/details/11946591 硬件资源及描述 s3c2440A 通用异步接收器和发送器(UART)提供了 ...
- linux 串口驱动(二)初始化 【转】
转自:http://blog.chinaunix.net/uid-27717694-id-3493611.html 8250串口的初始化: (1)定义uart_driver.uart_ops.uart ...
- omap3530 linux串口驱动,omap3530(Cortex-A8)硬件平台软件调试笔记
内容简介:描述调试过程中所遇问题及其解决办法和过程,可作为新手的FAQ使用. 1. Issue: 不能从SD卡启动. Fixed: 自己疏忽造成,手册已经提到要先用"HP Disk Stor ...
最新文章
- apache 域名跳转
- gpg加密命令 linux_用 PGP 保护代码完整性(四):将主密钥移到离线存储中 | Linux 中国...
- boost::foreach模块右值const的测试程序
- 公用机房配置台式计算机,计算机网络在公共机房中的应用
- jenkins与SonarQube集成
- python前端用什么架构_Python web世界观——web架构概览(适合传统软件工程师)...
- python绘制贝塞尔曲线_贝塞尔曲线数学原理及Python实现
- 2440/6410+minitools+superboot烧写裸机新方法!
- 【C#】通过Devcon.exe控制设备管理器中设备的启停
- Webgame服务端分布式架构设计
- 计算机等级考试(包括二级),包括几个级别?
- 一个完整的增删改查模块(以我们的项目‘危化品库管理’模块为例)
- 数据库原理及应用-李唯唯主编-实验3-2
- mybatis xml 格式化时间查询
- install firebox on ubuntu
- Mysql关联查询的几种方式(详解)
- LLVM中的String相关
- 用arjs和aframe打造太阳系-第二章
- 图深度学习入门教程(六)——注意力机制与图注意力
- 都这麽大了还不快了解IDS?