opencv 图像梯度(python)
图像梯度
- 图像梯度
- Sobel理论基础
- 计算水平方向偏导数的近似值
- 计算垂直方向偏导数的近似值
- Sobel算子及函数使用
- 注意点:参数ddepth
- 方向
- 计算x方向和y方向的边缘叠加
- Scharr算子及函数使用
- Sobel算子和Scharr算子的比较
- Laplacian算子及函数使用
- 算子总结
图像梯度
图像梯度计算的是图像变化的速度。
对于图像的边缘部分,其灰度值变化较大,梯度值也较大;相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小。
图像梯度计算需要求导数,但是图像梯度一般通过计算像素值的差来得到梯度的近似值(近似导数值)。(差分,离散)
Sobel算子、Scharr算子和Laplacian算子的使用。
Sobel理论基础
Sobel算子是一种离散的微分算子,该算子结合了高斯平滑和微分求导运算。
该算子利用局部差分寻找边缘,计算所得的是一个梯度的近似值。
![]()
滤波器通常是指由一幅图像根据像素点(x, y)临近的区域计算得到另外一幅新图像的算法。
滤波器是由邻域及预定义的操作构成的
滤波器规定了滤波时所采用的形状以及该区域内像素值的组成规律。滤波器也被称为“掩模”、“核”、“模板”、“窗口”、“算子”等。
一般信号领域将其称为“滤波器”,数学领域将其称为“核”。
线性滤波器: 滤波的目标像素点的值等于原始像素值及其周围像素值的加权和。这种基于线性核的滤波,就是所熟悉的卷积。
计算水平方向偏导数的近似值
将Sobel算子与原始图像src进行卷积计算,可以计算水平方向上的像素值变化情况。
例如,当Sobel算子的大小为3×3时,水平方向偏导数Gx的计算方式为:
![]()
计算垂直方向偏导数的近似值
当Sobel算子的大小为3×3时,垂直方向偏导数Gy的计算方式为:
![]()
Sobel算子及函数使用
使用函数cv2.Sobel()实现Sobel算子运算,其语法形式为:
dst = cv2.Sobel( src, ddepth, dx, dy[, ksize[, scale[, delta[, borderType]]]] )
- dst代表目标图像
- src代表原始图像
- ddepth代表输出图像的深度
![]()
dx代表x方向上的求导阶数。
dy代表y方向上的求导阶数。
ksize代表Sobel核的大小。该值为-1时,则会使用Scharr算子进行运算。
scale代表计算导数值时所采用的缩放因子,默认情况下该值是1,是没有缩放的。
delta代表加在目标图像dst上的值,该值是可选的,默认为0。
borderType代表边界样式。

注意点:参数ddepth
在函数cv2.Sobel()的语法中规定,可以将函数cv2.Sobel()内ddepth参数的值设置为-1,让处理结果与原始图像保持一致。但是,如果直接将参数ddepth的值设置为-1,在计算时得到的结果可能是错误的。
在实际操作中,计算梯度值可能会出现负数。如果处理的图像是8位图类型,则在ddepth的参数值为-1时,意味着指定运算结果也是8位图类型,那么所有负数会自动截断为0,发生信息丢失。为了避免信息丢失,在计算时要先使用更高的数据类型cv2.CV_64F,再通过取绝对值将其映射为cv2.CV_8U(8位图)类型。
通常要将函数cv2.Sobel()内参数ddepth的值设置为“cv2.CV_64F”。
要将偏导数取绝对值,以保证偏导数总能正确地显示出来。
在OpenCV中,使用函数cv2.convertScaleAbs()对参数取绝对值,该函数的语法格式为:
dst = cv2.convertScaleAbs( src [, alpha[, beta]] )
- dst代表处理结果。
- src代表原始图像。
- alpha代表调节系数,该值是可选值,默认为1。
- beta代表调节亮度值,该值是默认值,默认为0。
该函数的作用是将原始图像src转换为256色位图,其可以表示为:
dst=saturate(src*alpha+beta)
式中,saturate()表示计算结果的最大值是饱和值,例如: 当“src*alpha+beta”的值超过255时,其取值为255。
**例子:**使用函数cv2.convertScaleAbs()对一个随机数组取绝对值。
import cv2
import numpy as np
img=np.random.randint(-256,256, size=[4,5], dtype=np.int16)
rst=cv2.convertScaleAbs(img)
print("img=\n", img)
print("rst=\n", rst)
方向
在函数cv2.Sobel()中,参数dx表示x轴方向的求导阶数,参数dy表示y轴方向的求导阶数。参数dx和dy通常的值为0或者1,最大值为2。
如果是0,表示在该方向上没有求导。当然,参数dx和参数dy的值不能同时为0。
参数dx和参数dy可以有多种形式的组合,主要包含:
- 计算x方向边缘(梯度):dx=0, dy=1。
- 计算y方向边缘(梯度):dx=1, dy=0。
- 参数dx与参数dy的值均为1:dx=1, dy=1。
- 计算x方向和y方向的边缘叠加:通过组合方式实现。
例子
“dx=1, dy=0”。当然,也可以设置为“dx=2, dy=0”。此时,会仅仅获取垂直方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 1 , 0 )
“dx=0, dy=1”。当然,也可以设置为“dx=0, dy=2”。此时,会仅仅获取水平方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 0 , 1 )
“dx=1, dy=1”,也可以设置为“dx=2, dy=2”,或者两个参数都不为零的其他情况。此时,会获取两个方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 1 , 1 )
计算x方向和y方向的边缘叠加
如果想获取x方向和y方向的边缘叠加,需要分别获取水平方向、垂直方向两个方向的边缘图,然后将二者相加。
dx= cv2.Sobel( src , ddepth , 1 , 0 )
dy= cv2.Sobel( src , ddepth , 0 , 1 )
dst=cv2.addWeighted( src1 , alpha , src2 , beta , gamma )
例子
使用函数cv2.Sobel()获取图像水平方向的完整边缘信息
将参数ddepth的值设置为cv2.CV_64F,并使用函数cv2.convertScaleAbs()对cv2.Sobel()的计算结果取绝对值。
import cv2
o = cv2.imread('Sobel4.bmp', cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o, cv2.CV_64F,0,1)
Sobelx = cv2.convertScaleAbs(Sobelx)
cv2.imshow("original", o)
cv2.imshow("x", Sobelx)
cv2.waitKey()
cv2.destroyAllWindows()
计算函数cv2.Sobel()在水平、垂直两个方向叠加的边缘信息。
import cv2
o = cv2.imread('Sobel4.bmp', cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o, cv2.CV_64F,1,0)
Sobely = cv2.Sobel(o, cv2.CV_64F,0,1)
Sobelx = cv2.convertScaleAbs(Sobelx)
Sobely = cv2.convertScaleAbs(Sobely)
Sobelxy = cv2.addWeighted(Sobelx,0.5, Sobely,0.5,0)
cv2.imshow("original", o)
cv2.imshow("xy", Sobelxy)
cv2.waitKey()
cv2.destroyAllWindows()
Scharr算子及函数使用
在离散的空间上,有很多方法可以用来计算近似导数,在使用3×3的Sobel算子时,可能计算结果并不太精准。
OpenCV提供了Scharr算子,该算子具有和Sobel算子同样的速度,且精度更高。
可以将Scharr算子看作对Sobel算子的改进,其核通常为:
![]()
OpenCV提供了函数cv2.Scharr()来计算Scharr算子,其语法格式如下:
dst = cv2.Scharr( src, ddepth, dx, dy[, scale[, delta[, borderType]]] )
- dst代表输出图像。
- src代表原始图像。
- ddepth代表输出图像深度。该值与函数cv2.Sobel()中的参数ddepth的含义相同
- dx代表x方向上的导数阶数。
- dy代表y方向上的导数阶数。
- scale代表计算导数值时的缩放因子,该项是可选项,默认值是1,表示没有缩放。
- delta代表加到目标图像上的亮度值,该项是可选项,默认值为0。
- borderType代表边界样式。
在函数cv2.Sobel()中,如果ksize=-1,则会使用Scharr滤波器。
如下语句:
dst=cv2.Scharr(src, ddepth, dx, dy)
和
dst=cv2.Sobel(src, ddepth, dx, dy, -1)
是等价的。
函数cv2.Scharr()和函数cv2.Sobel()的使用方式基本一致。
参数ddepth的值应该设置为“cv2.CV_64F”,并对函数cv2.Scharr()的计算结果取绝对值,才能保证得到正确的处理结果。
具体语句为:
dst=Scharr(src, cv2.CV_64F, dx, dy)
dst= cv2.convertScaleAbs(dst)
在函数cv2.Scharr()中,要求参数dx和dy满足条件:
dx >= 0 && dy >= 0 && dx+dy == 1
和Sobel 不同, Scharr 的dx+dy 必须为1
参数dx和参数dy的组合形式有:
- 计算x方向边缘(梯度):dx=0, dy=1。
- 计算y方向边缘(梯度): dx=1, dy=0。
- 计算x方向与y方向的边缘叠加:通过组合方式实现。
例子
计算x方向边缘(梯度):dx=1, dy=0
dst=Scharr(src, ddpeth, dx=1, dy=0)计算y方向边缘(梯度):dx=0, dy=1
dst=Scharr(src, ddpeth, dx=0, dy=1)计算x方向与y方向的边缘叠加
将两个方向的边缘相加
dx=Scharr(src, ddpeth, dx=1, dy=0) dy=Scharr(src, ddpeth, dx=0, dy=1) Scharrxy=cv2.addWeighted(dx,0.5, dy,0.5,0)参数dx和dy的值不能都为1
Sobel算子和Scharr算子的比较
Sobel算子的缺点是,当其核结构较小时,精确度不高,而Scharr算子具有更高的精度。
Sobel算子和Scharr算子的核结构:
![]()
Laplacian算子及函数使用
Laplacian(拉普拉斯)算子是一种二阶导数算子,其具有旋转不变性,可以满足不同方向的图像边缘锐化(边缘检测)的要求。
通常情况下,其算子的系数之和需要为零。
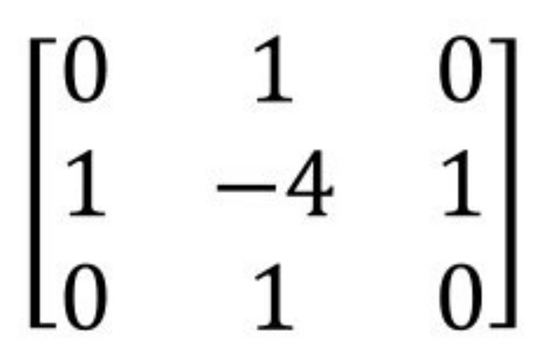
一个3×3大小的Laplacian算子
![]()
Laplacian算子类似二阶Sobel导数,需要计算两个方向的梯度值。
计算结果的值可能为正数,也可能为负数。所以,需要对计算结果取绝对值,以保证后续运算和显示都是正确的。
在OpenCV内使用函数cv2.Laplacian()实现Laplacian算子的计算,该函数的语法格式为:
dst = cv2.Laplacian( src, ddepth[, ksize[, scale[, delta[, borderType]]]] )
- dst代表目标图像。
- src代表原始图像。
- ddepth代表目标图像的深度。
- ksize代表用于计算二阶导数的核尺寸大小。该值必须是正的奇数。
- scale代表计算Laplacian值的缩放比例因子,该参数是可选的。默认情况下,该值为1,表示不进行缩放。
- delta代表加到目标图像上的可选值,默认为0。
- borderType代表边界样式。
该函数分别对x、y方向进行二次求导,具体为:
![]()
上式是当ksize的值大于1时的情况。当ksize的值为1时,Laplacian算子计算时采用的3×3的核如下:
通过从图像内减去它的Laplacian图像,可以增强图像的对比度,此时其算子为:
![]()
例子: 使用函数cv2.Laplacian()计算图像的边缘信息。
import cv2
o = cv2.imread('Laplacian.bmp', cv2.IMREAD_GRAYSCALE)
Laplacian = cv2.Laplacian(o, cv2.CV_64F)
Laplacian = cv2.convertScaleAbs(Laplacian)
cv2.imshow("original", o)
cv2.imshow("Laplacian", Laplacian)
cv2.waitKey()
cv2.destroyAllWindows()
算子总结
Sobel算子、Scharr算子、Laplacian算子都可以用作边缘检测
![]()
Sobel算子和Scharr算子计算的都是一阶近似导数的值。通常情况下,可以将它们表示为:
Sobel算子= |左-右| 或 |下-上|
Scharr算子=|左-右| 或 |下-上|
Laplacian算子计算的是二阶近似导数值,可以将它表示为:
- Laplacian算子=|中-左| + |中-右| + |中-下| + |中-上|
opencv 图像梯度(python)相关推荐
- OpenCV——图像梯度与边缘检测(python实现)
OpenCV--图像梯度与边缘检测 6.1 简介 严格的说,梯度计算需要求导数.但是图像梯度的计算,是通过计算像素值的差得到梯度的近似值.图像梯度表示的是图像变化的速度,反映了图像的边缘信息. 边缘是 ...
- OpenCV图像梯度(Sobel和Scharr)
OpenCV图像梯度(Sobel和Scharr) 1 图像梯度是什么? 2 图像梯度的用途 3 图像梯度的使用 参考 这篇博客将介绍图像渐变以及如何使用OpenCV的cv2.Sobel计算Sobel渐 ...
- 基于Python的Opencv图像梯度处理
图像梯度直观反应其实就是图像当中各物体的轮廓,而在像素点上的体现其实就是相邻像素点之间的差值,差值越大,轮廓就会越清晰(可用于图像增强),而Opencv提供了以下三种算子来进行图像的梯度处理,跟在之前 ...
- OpenCV 图像梯度 Sobel、Scharr、Laplacian
概念: 梯度简单来说就是求导,在图像上表现出来的就是提取图像的边缘(不管是横向的.纵向的.斜方向的等等),所需要的无非也是一个核模板,模板的不同结果也不同.所以可以看到,所有的这些个算子函数,归结到底 ...
- python opencv 图像叠加,python opencv图像叠加/图像融合/mask掩模
目录python 一.图像叠加 能够经过OpenCV函数cv.add()或简单地经过numpy操做添加两个图像,res = img1 + img2.两个图像应该具备相同的深度和类型,或者第二个图像能够 ...
- OpenCV 图像梯度 :cv2.Sobel(),cv2.Schar(),cv2.Laplacian() + 数据类型设置:cv2.CV_8U,cv2.CV_16S,cv2.CV_64F
原理: 梯度本质上就是导数.OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr 和Laplacian.Sobel,Scharr 其实就是求一阶或二阶导数.Scharr ...
- OpenCV图像梯度算子
梯度简单来说就是求导. OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr 和 Laplacian. Sobel,Sc ...
- opencv图像运算(python)
图像运算 图像运算 图像加法运算 加号运算符 cv2.add 图像加权和 按位逻辑运算 按位与 按位或 按位非 按位异或 掩膜 图像与数值的运算 位平面分解 图像加密和解密 数字水印 图像运算 图像加 ...
- opencv 图像金字塔(python)
图像金字塔 图像金字塔 理论基础 下采样 上采样 pyrDown函数 pyrUp函数 采样可逆性的研究 拉普拉斯金字塔 图像金字塔 图像金字塔是由一幅图像的多个不同分辨率的子图所构成的图像集合 该组图 ...
最新文章
- leetcode—Valid Parentheses
- VC中的Attach和Detach
- oracle as sydba,oracle用户 sysdba 与system,sysoper的区别
- 新版SVT-AVS3发布 编码效率提升并提供更灵活的编码工具
- html标签object和embed,html标签object和embed的区别
- 如何用WSUS2.0分发补丁
- 控制理论与控制工程算计算机相关专业吗,控制理论与控制工程专业介绍
- 管家婆 凭证查找 Date exceeds maximum of 19-12-31 报错解决办法
- 程序设计C 实验六 结构体 题目四 偷菜时间表
- 速记TCP/IP五层模型
- Hibernate框架基础——cascade属性
- 谷歌浏览器网页打不开怎么办
- Python自动化测试学习3
- Linux下的lds链接脚本详解
- python calu()函数_python面向对象
- 咫尺天涯 三世桃花
- esp32烧录的时候出现报错Chip sync error :Failed to connect to ESP32: Timed out waiting for packet heade
- 车易加加油抵扣卡:美布两油收涨2%,上调线将被攻破
- 虚拟现实:认识VR、AR、全息影像和全景视频的涵意
- c# 单元测试nunit