Using rqt_console and roslaunch
Description: This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once
debug工具
- rqt_console
- rqt_logger_level
rosrun rqt_console rqt_console #界面化的实时的日志监控
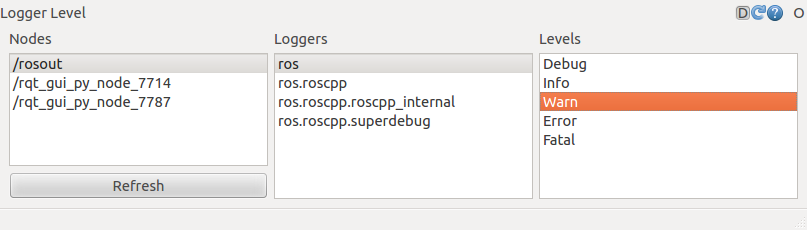
rosrun rqt_logger_level rqt_logger_level #界面化的用于设置日志级别 支持的日志级别
Fatal
Error
Warn
Info
Debug
roslaunch
echo $ROS_PACKAGE_PATH
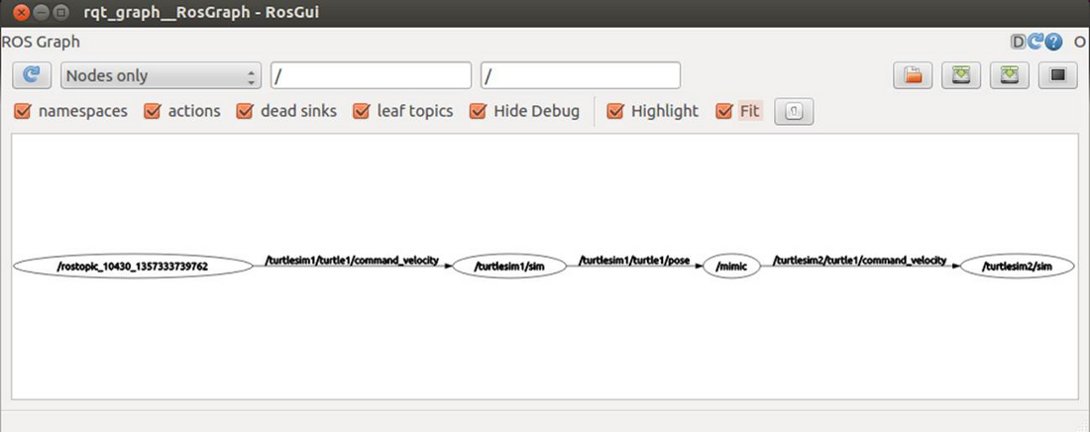
<launch> --标明这是一个launch file<group ns="turtlesim1"> --不同的namespace 允许有起2个同样name的node<node pkg="turtlesim" name="sim" type="turtlesim_node"/></group><group ns="turtlesim2"><node pkg="turtlesim" name="sim" type="turtlesim_node"/></group><node pkg="turtlesim" name="mimic" type="mimic"> --起一个mimic node.<remap from="input" to="turtlesim1/turtle1"/> --This renaming will cause turtlesim2 to mimic turtlesim1<remap from="output" to="turtlesim2/turtle1"/></node></launch>读取turtlemimic.launch文件启动node
roslaunch beginner_tutorials turtlemimic.launchrqt或rqt_graph查看roslaunch实际做了什么
转载于:https://www.cnblogs.com/sdu20112013/p/10576951.html
Using rqt_console and roslaunch相关推荐
- 使用 rqt_console 和 roslaunch
Description: 本教程介绍如何使用 rqt_console 和 rqt_logger_level 进行调试,以及如何使用 roslaunch 同时运行多个节点.早期版本中的 rqt 工具并 ...
- ROS学习笔记七:使用rqt_console和roslaunch
ROS学习笔记七:使用rqt_console和roslaunch 本节主要介绍在调试时使用的rqt_console和rqt_logger_level,以及一次性打开多个节点的工具roslaunch. ...
- ROS学习(九)—— rqt_console 和 roslaunch
一.rqt_console 和rqt_logger_level 1.作用: rqt_console依据ROS编译日志,输出节点信息 rqt_logger_level可以改变节点的警告出差的警告等级 2 ...
- ROS的学习(十)rqt_console和roslaunch
打开一个新的终端在里面输入: sudo apt-get install ros-hydro-rqt ros-hydro-rqt-common-plugins ros-hydro-turtlesim 安 ...
- 使用rqt_console和roslaunch---ROS学习第7篇
文章目录 1. 准备工作 2.使用rqt_console和rqt_logger_level 2.1 日志记录器级别 2.2 使用roslaunch 2.3 launch文件 2.4 launch解析 ...
- ROS学习——3 roslaunch的使用
在我们安装ros的时候都测试过小海龟的案例,但是当我们同时开启两个小海龟的时候,旧的小海龟就会被关闭(原因是节点名相同).下面记录如何同时打开两个小海龟节点. 官网教程:使用rqt_console和r ...
- ROS 命令以及相关内容学习(二)
在上一节中我们已经学习了package node topic message 这些的运行方式,下面我们去理解service 的运行方式. 1.sevice 1 #命令 2 rosservice lis ...
- ROS入门_1.10 理解ROS服务和参数
目录 ROS Services 使用rosservice rosservice list rosservice type rosservice call Using rosparam rosparam ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
最新文章
- koa+mongoose基础入门
- JavaScript中数组使用总结
- 十一、“由专入分易,由分入专难。”(2020.12.18)
- 使用KubeKey 离线环境部署 KubeSphere v3.0.0
- 机器学习之路:python k近邻回归 预测波士顿房价
- Puffer:专注拥塞控制、带宽预测和ABR
- php pdo 00000,php-即使有错误,PDO错误代码也总是00000
- LeetCode 2161. 根据给定数字划分数组
- easyui form表单提交标准格式
- WWDC2019: SwiftUI实现你的第一个App
- keil4及其注册机、stc-isp烧入软件
- MOS管耗尽型和增强型的区别是什么呢?
- Python+Django+Mysql电影推荐系统 基于用户、项目、内容的协同过滤推荐算法 MovieRecommendSystemPython python实现协同过滤推荐算法实现 源代码下载
- 扫荡倾斜摄影单体化难题
- PIXIJS学习笔记
- 关于 npm 安装angular报错‘code EEXIST‘,ERR path C:\Users\Administrator\AppData\Roaming\npm\node_modules
- 15分钟读懂进程线程、同步异步、阻塞非阻塞、并发并行
- 小程序源码:网课查题微信小程序源码下载,题库资源丰富自动采集,支持语音拍照识别
- Rabbit的字符串
- 按如下函数原型编程从键盘输入一个m行n列的二维数组,然后计算数组中元素的最大值及其所在的行列下标值。其中,m和n的值由用户键盘输入。已知m和n的值都不超过10。